EP1199622A1 - Operating element - Google Patents
Operating element Download PDFInfo
- Publication number
- EP1199622A1 EP1199622A1 EP01122079A EP01122079A EP1199622A1 EP 1199622 A1 EP1199622 A1 EP 1199622A1 EP 01122079 A EP01122079 A EP 01122079A EP 01122079 A EP01122079 A EP 01122079A EP 1199622 A1 EP1199622 A1 EP 1199622A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- element according
- platform
- control element
- control
- connecting elements
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005259 measurement Methods 0.000 claims abstract description 6
- 238000006073 displacement reaction Methods 0.000 claims abstract description 4
- 241000238631 Hexapoda Species 0.000 claims description 23
- 238000005452 bending Methods 0.000 claims description 17
- 238000011156 evaluation Methods 0.000 claims description 16
- 238000010168 coupling process Methods 0.000 claims description 12
- 230000008878 coupling Effects 0.000 claims description 11
- 238000005859 coupling reaction Methods 0.000 claims description 11
- 230000004913 activation Effects 0.000 claims description 7
- 230000008859 change Effects 0.000 claims description 4
- 238000000034 method Methods 0.000 abstract description 3
- 230000006835 compression Effects 0.000 abstract 1
- 238000007906 compression Methods 0.000 abstract 1
- 238000012545 processing Methods 0.000 description 5
- 230000003750 conditioning effect Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000011161 development Methods 0.000 description 3
- 230000018109 developmental process Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000012549 training Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000003811 finger Anatomy 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000005693 optoelectronics Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
- G05G9/04737—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks with six degrees of freedom
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20012—Multiple controlled elements
- Y10T74/20201—Control moves in two planes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20213—Interconnected
Definitions
- the invention relates to an operating element for manual Control of spatial movement sequences of a to be controlled System.
- Operating elements are used to control mechanisms used, for example, one Operating lever or a joystick, which is a or two axes are pivotable. These controls allow control of the mechanism in two Degrees of freedom.
- EP-A-0 981 describes 078 a joystick-like operating lever that is using a universal joint in two directions, forward and can move back and left and right.
- the aim of the present invention is to provide an operating element to get control of more than two and up to six degrees of freedom allowed. Driving to the six Degrees of freedom should be possible at the same time.
- the operator should only be a handle, for example a Control levers that are available to operate all Makes degrees of freedom possible without additional Activation elements must be operated.
- the object underlying the invention is seen in specify an operating element of the type mentioned at the outset, through which the aforementioned problems are overcome and the Goals are achieved.
- a simple, ergonomic operation one control in more than two Degrees of freedom may be possible.
- the control element according to the invention contains a handle, which can be designed as an operating lever and from can be operated by an operator.
- the handle is on attached to a platform so that the platform of movement the handle follows or so that is exerted on the handle Forces are transferred to the platform.
- Between the Platform and a fixed console are at least six Fasteners arranged.
- On the handle forces can preferably be in six degrees of freedom exercise: in three different translational directions and around three different axes of rotation. this leads to Length signals or force signals that the Fasteners are assigned.
- Coordinates and three orientation angles determine which the Location of the platform in relation to the console or which the on the applied force vectors and moment vectors reflect.
- the measuring signals of the position encoder or the Force transducers reflect the position of the handle or on the Manage forces and moments in a clear way contrary.
- Known methods can be used for the calculation of coordinates are used (Hebsacker, M .: The design of the kinematics des Hexaglide - "Methodology for the design of parallel Machine Tools ", VDI Reports No. 1427, 1998).
- the length signals or the force signals are represented by a Evaluation unit evaluated and to control the Movements of the system to be controlled are used. there calculates the evaluation unit from the measured values which the Kinematics of the handle reflect the respective position of the Handle or the forces exerted on the handle and Moments and gives appropriate control signals to the controlling system.
- the control element according to the invention can thus be used for manual Control of spatial movement sequences of a to be controlled System, for example a virtual system, be used. It can be done with just one Control element a control of spatial movements of a system to be controlled in up to six degrees of freedom without additional switches and the like must be operated. The control can thus be simple and done ergonomically.
- Hexapods are basic are known and are used, for example, in measuring devices Checking the position accuracy of machine tools (DE-A-35 04 464), for motorized coordinate measuring machines (DE-A-197 20 049) and used in robot kinematics.
- machine tools DE-A-35 04 4614
- motorized coordinate measuring machines DE-A-197 20 049
- robot kinematics Under hexapod an arrangement of connecting elements is to be understood, which enables movements in six degrees of freedom.
- the hexapod can have six or more (for example eight) fasteners contain.
- the handle can be moved laterally in two directions, for example swivel, twist around its axis, laterally in two Shift directions and out in the direction of their axis Push. If force sensors are used, the movements of the handle must be so small that they Operator are not noticed. In this case the operator for setting control commands does not carry out a certain spatial adjustment of the handle, but exert forces on the handle that the desired Control signals. Such a versatile activity a handle is with the previously known controls not possible.
- the invention can be used for the control of mechanisms Use more than two degrees of freedom.
- a preferred one Use case arises in connection with a Attachment interface for coupling work tools to a Work vehicle, as it is in the subsequently published DE-A-199 51 840 is described.
- With the mounting interface described there are six between a tractor body and a coupling frame Hydraulic cylinders arranged in the manner of a hexapod intended.
- These hydraulic cylinders can by Control element according to the invention can be controlled by the signals of each encoder or force transducer Operating hexapods for controlling a corresponding one Hydraulic cylinder of the add-on interface hexapod becomes.
- control element as a so-called "three-dimensional mouse” is used and the control serves virtual spatial movements, for example can be made visible on a screen.
- each telescopic leg contains two longitudinally displaceable relative to each other Telescopic rods, the free ends of which can be pivoted on all sides Attack platform or on the console, the Attack points in the area of the corner points of a triangle can lie.
- the telescopic legs are with position encoders equipped, the length signals of the respective length of the corresponding telescopic leg correspond.
- Each telescopic leg can be one to both, for example Have open cylinder housing on each side Side holds a sliding telescopic rod.
- the Telescopic rods are held in their central position by springs supported. By actuating the operating lever against the force of the springs can be the lengths of the struts change. When the operating lever is released, the Platform and with it the operating lever in the middle position back.
- the Telescopic rods also each have a friction seat in the Cylinder housing to be guided, so that for a Longitudinal displacement friction forces must be overcome.
- the position encoders can be ohmic Act sliding resistors. However, it is also possible for example inductive, capacitive or optoelectronic To use displacement transducers.
- the connecting elements in their longitudinal extent in are essentially rigid so that they can be exercised axial forces are neither longer nor shorter.
- force transducers measured. For example, come as a force transducer Strain gauges or piezoelectric sensors.
- the attachment points on the platform and / or on the console are preferably approximately in the range the corners of an equilateral triangle.
- two connecting elements are articulated near each corner, and can be given away in two directions. It can However, it should also be appropriate to the articulation points in about Corners of a rectangle or a hexagon or in another arrange geometric figure. With a square you can for example, two connecting elements on two attack adjacent corners of the square, and one each or two each of the other connecting elements to the other two corners of the square.
- the connecting elements rigidly on the console too attach and articulate to the platform.
- one for each of the articulated connections or more rubber-like elements used that have a side Tilting of the connecting elements in relation to the platform allow, but are sufficiently rigid to pull and To transmit pressure forces.
- a particularly preferred development of the invention provides before that the platform contains bending elements, each of which attacks a rigid connecting element and which or bend momentary loads on the handle.
- the bending elements are preferably rod or tab-shaped trained and rigid with at least one end with the Platform connected. They are transverse to the longitudinal extension of the Fasteners aligned. The term crosswise closes in addition to a right-angled formation also other angles between the orientations of the bending element and the Connecting element. These are expediently Bending elements with only one of their ends with the platform connected and stand laterally with their other, free end from the platform.
- each Attack fastener it is advantageous in the area the corner each formed two or more as a bending element side by side and essentially parallel to each other to provide running rods or tabs.
- the tabs can be, for example form such that the platform slits in its corners and the slots essentially to the center of the platform are aligned.
- a bending element e.g. a tab
- the Area between the attachment point of the connecting element and the central area of the platform is essentially in radial direction, i.e. towards the center of the platform Strain gauges arranged.
- top and bottom are called surfaces of the bending element, which in essentially transverse to the longitudinal extension of the connecting elements run.
- Temperature compensation and signal amplification To achieve (doubling), it is beneficial to both on the Top as well as on the bottom of a bending element each to arrange at least one strain gauge.
- the two Strain gauges are connected to form a half bridge.
- the Half bridge can be integrated into a full bridge within the amplifier complete and provide an output signal in the form of a Bridge imbalance.
- the bridge voltage can be fed to a measuring amplifier which is integrated in a microcontroller.
- a measuring amplifier which is integrated in a microcontroller.
- the microcontroller can also do the whole Take over geometry calculation. It calculates the output signals into force and moment components and passes this data on a bus line, for example a CAN bus.
- the absolute The value of each force and moment component is a measure of that The speed at which the system to be controlled is moving should.
- the directions of the forces give the direction of the Translation and the direction of the moments give the direction of the System rotation.
- the evaluation electronics can be integrated Have semiconductor elements as it is for printing and Accelerometers is common.
- the type Training angle lever in which one leg, for example protrudes vertically from the platform and the other free, in essentially right-angled legs approximately parallel runs to the platform.
- the free leg is in his unactuated rest position upwards and can be Operator comfortably within six degrees of freedom actuate.
- control element further increasing of the invention in the area of the free end of the handle arranged at least one control element. It is about for example, one with a finger or the Thumb operated switch or push button through which a electrical switch is operated, or to a role that is connected to an electrical analog encoder. It can also an activation flap can be mounted on the handle, such as it was described for example in DE-A-0 981 078.
- Such controls allow security requirements fulfill and control other functions without that the operator remove their hand from the handle got to.
- the control can be in the Functionality should be integrated that is to be controlled System can only be moved by operating the handle, if an operating switch integrated in the handle is operated. This allows an unintended one Actuation of the system to be controlled, e.g. B. while driving, avoid.
- the output characteristic of the evaluation unit preferably depends on non-linearly from the measured tensile or compressive forces so that with a linear increase in bending force a non-linear operating speed for the system to be controlled is specified.
- By influencing the Output characteristic there is also the possibility of giving the system a To give response threshold.
- the six measurement variables can be transformed through coordinate transformations Forces or paths in any spatial Coordinate system can be calculated.
- the force sizes in the main axis directions of the handle determine.
- the movement quantities e.g. Target speeds in the respective directions
- a possible area of application on which the control element according to the invention the operation can be easier is to control one as a hexapod trained system, for example the Hexapod system of Attachment device of a work vehicle.
- the geometry of the control element hexapods to adapt to the geometry of the system hexapods so that this are similar to each other.
- the length dimensions and Articulation points of the telescopic legs in a fixed ratio to the length dimensions and articulation points of the drive elements of the system hexapods, so the kinematics of the two Hexapod arrangements are similar or identical to each other.
- the operator can thus the coupling triangle from the vehicle position Operate as desired to carry out coupling processes or that to move the attached device as required.
- the control element can e.g. B. also the control of a vehicle power lift, for example, a front linkage.
- Control element according to the invention is in the Vehicle control, in which the control element of the control serves a vehicle component.
- the console of the control element part of a vehicle console is in particular part of the vehicle position.
- the operating lever 12 is a joystick-like on a platform 10
- Operating lever 12 attached, which is not in its actuated rest position.
- the operating lever 12 has two legs running essentially perpendicular to each other 14, 16, of which a first leg 14 essentially protrudes vertically from the platform 10 and a second leg 16 is angled upwards.
- the second leg 16 is a ergonomically designed control handle and leaves one convenient operation too.
- the platform 10 is essentially an equilateral triangle formed with one corner of the triangle at the top. Approximately in the area of each corner of this triangle two grab each Telescopic legs 18, 20, 22, 24, 26, 28 formed connecting elements on. The other ends of the telescopic legs 18, 20, 22, 24, 26, 28 are only partially on one shown vehicle console 30 articulated, the Articulation points also essentially an equilateral Form a triangle, but around the platform triangle Is rotated 60 ° so that one corner of this triangle is below lies. The articulation points between the telescopic legs 18, 20, 22, 24, 26, 28 and platform 10 or console 30 pivoting of the telescopic legs 18, 20, 22, 24 on all sides, 26, 28 to.
- the telescopic legs 18, 20, 22, 24, 26, 28 are like one Hexapods between platform 10 and console 30 arranged.
- Each telescopic leg contains 18, 20, 22, 24, 26, 28 two axially displaceable Telescopic rods and one not shown Position encoder, which determines the relative position between the two Articulation points of the telescopic leg 18, 20, 22, 24, 26, 28 detected and corresponding length signals to an evaluation unit 32 emits.
- a side Control element in the form of a pressure switch 33 (Activation button) arranged on the second leg 16 of the operating lever 12 .
- a pressure switch 33 Activation button
- the Attachment interface 36 includes a coupling frame 38 Hook 40 for fastening not shown Implements. Between the coupling frame 38 and the Tractor body 42 extends six hydraulic cylinders 44, 46, 48, 50, 52, 54, arranged in the manner of a hexapod and be operated. The spatial linkage of the hydraulic cylinders and their length dimensions are fixed Proportional ratio to the spatial articulation points and Length dimensions of the telescopic legs 18, 20, 22, 24, 26, 28 des Control element 34.
- the Activation determines the evaluation device 32 the measured value each encoder and gives proportional control signals to the hydraulic cylinders 44, 46, 48 corresponding to the position sensors 50, 52, 54 from. For example, the measurement signal of the Telescopic legs 20 through the evaluation device 32 in one Control signal for the hydraulic cylinder 46 converted.
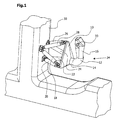
- FIG. 3 shows an alternative embodiment to that of FIG Control element out.
- the one in between triangular platform 60 and a mounting plate 62 arranged connecting elements are not telescopic here formed, as shown in Fig. 1. Rather, it is about 3 around rigid connecting rods 64, 66, 68, 70, 72, 74. Similar to FIG. 1, the connecting rods 64, 66, 68, 70, 72, 74 in the corner area of equilateral triangles arranged. However, they are rigid with the mounting plate connected and stand with the platform via a rubber element 76, which forms an articulated connection.
- each tab 80 In the area of the three corners of the platform 60 there are two each formed parallel to each other tabs 80, the are separated from each other by a slot 82.
- the Tabs 80 and slots 82 are towards the center of platform 60, So aligned to handle 78.
- the tabs 80 are each one end of a connecting rod 64, 66, 68, 70, 72, 74 with the interposition of a rubber element 76 attached.
- each tab 80 an upper strain gauge 84 attached.
- the Strain gauges 84 are parallel to the tabs 80 with their Longitudinal alignment towards the center of the platform.
- the Strain gauges 84 are in a region of the respective tab 80 arranged between the rubber element 76 and that of End of the slot 82 facing the center of the platform. forces when a handle 80 is actuated by a tab 80 on the associated rigid connecting rod 64, 66, 68, 70, 72, 74 exercised lead to a corresponding bending the tab 80 up or down and thus one corresponding change in resistance of the strain gauge 84.
- each tab 80 On the opposite side of the visible platform The back of each tab 80 is opposite the top Strain gauges 84 each have a lower one, not in FIG. 3 Strain gauge 86 visible but shown in FIG. 4.
- a front strain gauge 84 and a rear strain gauge 86 are connected together in a half bridge.
- the half bridge is supplemented by three supplementary resistors 88, 90, 98 to form a full bridge.
- the resistor 98 is an adjustable resistor, through which a manual, rough zero adjustment of the bridge circuit can be carried out.
- a bridge supply voltage U S is applied to the strain gauges 84, 86 connected in series.
- the bridge provides a bridge voltage U B in the form of a bridge detuning at a center tap between the two strain gauges 84, 86 on the one hand and at a center tap between the two supplementary resistors 88, 90 on the other hand.
- the arrangement of the strain gauges 84, 86 in a bridge circuit results in temperature compensation between the front and rear of the platform 60.
- the use of two strain gauges 84, 86 per tab 80 further doubles the output signal compared to only one strain gauge.
- the bridge voltage U B is amplified by a measuring amplifier 92 and then fed to an input signal processor 94.
- the input signal conditioning 94 is connected to a zero adjustment device 96.
- the zero compensation device can be a corresponding program part.
- the integrated zero adjustment allows drifts of the measuring amplifier 92 as well as small plastic changes in the system or voltage fluctuations to be automatically compensated.
- the automatic zero adjustment is only carried out when the operating element is not to be operated and therefore an activation switch arranged on the operating handle 78 is not operated.
- the output voltage U A of the input signal conditioning 94 is a measure of the force in the respective connecting rod 64, 66, 68, 70, 72, 74.
- An output voltage U A is provided for each pair of strain gauges 84, 86.
- the output voltages U A of all pairs of strain gauges 84, 86, of which only one was shown in FIG. 4, are fed to a geometry calculation unit 100, by means of which the measurement signals are converted into force and moment components.
- the force components F x , F y and F z and the moment components M x , M y and M z are calculated in the usual way by coordinate transformation from the respective geometry (direction) of the connecting rods 84, 86, 88, 90, 92, 94 and the force measured values of the strain gauges 84, 86.
- force F x in the x direction force F y in the y direction
- force F z in the z direction moment M x about the x axis
- moment M y around the y axis moment M z around the z axis.
- the magnitude of the forces is a measure of the speed at which the system to be controlled is to be moved, while the direction of the forces reflects the direction of translation and the direction of the moments reflect the direction of rotation of the system.
- the output signals of the geometry calculation unit 100 are in an output signal processing 102, which with a Characteristic curve memory 104 is connected in accordance with the provided characteristics of a non-linear conversion subjected and to a via a plug, not shown CAN bus 106 output.
- a Characteristic curve memory 104 is connected in accordance with the provided characteristics of a non-linear conversion subjected and to a via a plug, not shown CAN bus 106 output.
- strain gauges 84, 86 Supplementary resistors 88, 90, 98 amplifier 92, Input signal conditioning 94 and zero balancing devices 96 are together with the geometry calculation unit 100, the Output signal processing 102 and the characteristic curve memory 104 combined into a common integrated component 108.
- This component 108 is preferably on the Back of the platform 60 attached. However, it can also be appropriate, the component 108 in an external Housing the controller housing.
Abstract
Description
Die Erfindung betrifft ein Bedienungselement zur manuellen Ansteuerung räumlicher Bewegungsabläufe eines zu steuernden Systems.The invention relates to an operating element for manual Control of spatial movement sequences of a to be controlled System.
Für die Ansteuerung von Mechanismen werden Bedienungselemente eingesetzt, bei denen es sich beispielsweise um einen Bedienungshebel oder um einen Joystick handelt, die um eine oder zwei Achsen verschwenkbar sind. Diese Bedienungselemente ermöglichen eine Ansteuerung des Mechanismus in zwei Freiheitsgraden. So beschreibt beispielsweise die EP-A-0 981 078 einen joystickartig ausgebildeten Bedienungshebel, der sich mittels eines Kreuzgelenks in zwei Richtungen, nach vorn und hinten sowie nach links und rechts bewegen lässt. Auf dem Betätigungsgriff des Bedienungshebels befinden sich zwei elektrische Druckschalter zur manuellen Auslösung weiterer Steuersignale.Operating elements are used to control mechanisms used, for example, one Operating lever or a joystick, which is a or two axes are pivotable. These controls allow control of the mechanism in two Degrees of freedom. For example, EP-A-0 981 describes 078 a joystick-like operating lever that is using a universal joint in two directions, forward and can move back and left and right. On the There are two operating handles on the operating lever electrical pressure switches for manual triggering of further Control signals.
Für die Ansteuerung der Bewegung in mehr als zwei Freiheitsgraden, z. B. für räumliche Bewegungsabläufe, können zusätzliche Steuerelemente, wie Rollen oder elektrische Druckknöpfe in den Bedienungshebel integriert sein. Dadurch wird jedoch die Bedienung kompliziert und ist ergonomisch nicht optimal.For controlling the movement in more than two Degrees of freedom, e.g. B. for spatial movements additional controls, such as roles or electrical Push buttons can be integrated in the operating lever. Thereby However, the operation becomes complicated and is not ergonomic optimal.
Ziel der vorliegenden Erfindung ist es, ein Bedienungselement zu erhalten, welches das Steuern von mehr als zwei und bis zu sechs Freiheitsgraden erlaubt. Das Ansteuern der sechs Freiheitsgrade soll gleichzeitig möglich sein. Dem Bediener soll dabei lediglich eine Handhabe, beispielsweise ein Bedienhebel, zur Verfügung stehen, der das Bedienen aller Freiheitsgrade möglich macht, ohne dass zusätzliche Aktivierungselemente betätigt werden müssen.The aim of the present invention is to provide an operating element to get control of more than two and up to six degrees of freedom allowed. Driving to the six Degrees of freedom should be possible at the same time. The operator should only be a handle, for example a Control levers that are available to operate all Makes degrees of freedom possible without additional Activation elements must be operated.
Die der Erfindung zugrunde liegende Aufgabe wird darin gesehen, ein Bedienungselement der eingangs genannten Art anzugeben, durch welches die vorgenannten Probleme überwunden und die Ziele erreicht werden. Insbesondere soll durch eine einfache, ergonomische Bedienung eine Ansteuerung in mehr als zwei Freiheitsgraden möglich sein.The object underlying the invention is seen in specify an operating element of the type mentioned at the outset, through which the aforementioned problems are overcome and the Goals are achieved. In particular, a simple, ergonomic operation one control in more than two Degrees of freedom may be possible.
Die Aufgabe wird erfindungsgemäß durch die Lehre des Patentanspruchs 1 gelöst. Weitere vorteilhafte Ausgestaltungen und Weiterbildungen der Erfindung gehen aus den Unteransprüchen hervor.The object is achieved by the teaching of Claim 1 solved. Further advantageous configurations and further developments of the invention result from the subclaims out.
Das erfindungsgemäße Bedienungselement enthält eine Handhabe, die als Bedienungshebel ausgebildet sein kann und sich von einer Bedienungsperson betätigen lässt. Die Handhabe ist an einer Plattform befestigt, so dass die Plattform der Bewegung der Handhabe folgt bzw. so dass auf die Handhabe ausgeübte Kräfte auf die Plattform übertragen werden. Zwischen der Plattform und einer feststehenden Konsole sind wenigstens sechs Verbindungselemente angeordnet. Des weiteren sind Wegmessgeber zur Erfassung der Längenänderungen der Verbindungselemente bzw. Kraftmessgeber zur Erfassung der in den Verbindungselementen wirkenden Zug- und Druckkräfte vorgesehen. Auf die Handhabe lassen sich Kräfte in vorzugsweise sechs Freiheitsgraden ausüben: in drei unterschiedliche translatorische Richtungen und um drei unterschiedliche Drehachsen. Dies führt zu Längensignalen bzw. zu Kraftsignalen, die den Verbindungselementen zugeordnet sind.The control element according to the invention contains a handle, which can be designed as an operating lever and from can be operated by an operator. The handle is on attached to a platform so that the platform of movement the handle follows or so that is exerted on the handle Forces are transferred to the platform. Between the Platform and a fixed console are at least six Fasteners arranged. There are also position encoders for recording the changes in length of the connecting elements or Force transducer for detecting the in the connecting elements acting tensile and compressive forces provided. On the handle forces can preferably be in six degrees of freedom exercise: in three different translational directions and around three different axes of rotation. this leads to Length signals or force signals that the Fasteners are assigned.
Aus den Längensignalen bzw. den Kraftsignalen lassen sich drei Koordinaten und drei Orientierungswinkel bestimmen, welche die Lage der Plattform in Bezug auf die Konsole bzw. welche die auf die Handhabe ausgeübten Kraftvektoren und Momentvektoren widerspiegeln. Die Messsignale der Wegmessgeber bzw. der Kraftmessgeber spiegeln die Lage der Handhabe bzw. die auf die Handhabe ausgeübten Kräfte und Momente in eindeutiger Weise wider. Bei der Koordinatenberechnung können bekannte Methoden eingesetzt werden (Hebsacker, M.: Die Auslegung der Kinematik des Hexaglide - "Methodik für die Auslegung paralleler Werkzeugmaschinen", VDI Berichte Nr. 1427, 1998).Three can be made from the length signals or the force signals Coordinates and three orientation angles determine which the Location of the platform in relation to the console or which the on the applied force vectors and moment vectors reflect. The measuring signals of the position encoder or the Force transducers reflect the position of the handle or on the Manage forces and moments in a clear way contrary. Known methods can be used for the calculation of coordinates are used (Hebsacker, M .: The design of the kinematics des Hexaglide - "Methodology for the design of parallel Machine Tools ", VDI Reports No. 1427, 1998).
Die Längensignale bzw. die Kraftsignale werden durch eine Auswerteeinheit ausgewertet und zur Ansteuerung der Bewegungsabläufe des zu steuernden Systems herangezogen. Dabei berechnet die Auswerteeinheit aus den Messwerten, welche die Kinematik der Handhabe widerspiegeln, die jeweilige Lage der Handhabe bzw. die auf die Handhabe ausgeübten Kräfte und Momente und gibt entsprechende Steuersignale an das zu steuernde System ab.The length signals or the force signals are represented by a Evaluation unit evaluated and to control the Movements of the system to be controlled are used. there calculates the evaluation unit from the measured values which the Kinematics of the handle reflect the respective position of the Handle or the forces exerted on the handle and Moments and gives appropriate control signals to the controlling system.
Das erfindungsgemäße Bedienungselement kann damit zur manuellen Ansteuerung räumlicher Bewegungsabläufe eines zu steuernden Systems, beispielsweise auch eines virtuellen Systems, verwendet werden. Es lässt sich mit lediglich einem Bedienungselement eine Ansteuerung räumlicher Bewegungsabläufe eines zu steuernden Systems in bis zu sechs Freiheitsgraden vornehmen, ohne dass zusätzliche Schalter und dergleichen betätigt werden müssen. Die Ansteuerung kann damit auf einfache und ergonomisch günstige Weise erfolgen.The control element according to the invention can thus be used for manual Control of spatial movement sequences of a to be controlled System, for example a virtual system, be used. It can be done with just one Control element a control of spatial movements of a system to be controlled in up to six degrees of freedom without additional switches and the like must be operated. The control can thus be simple and done ergonomically.
Es ist von besonderem Vorteil, die Verbindungselemente nach Art eines Hexapoden anzuordnen. Hexapoden sind grundsätzlich bekannt und werden beispielsweise bei Messgeräten zur Überprüfung der Positionsgenauigkeit von Werkzeugmaschinen (DE-A-35 04 464), bei motorischen Koordinatenmessgeräten (DE-A-197 20 049) und bei Roboterkinematiken verwendet. Unter Hexapod soll eine Anordnung von Verbindungselementen verstanden werden, die Bewegungen in sechs Freiheitsgraden ermöglicht. Das Hexapod kann sechs oder mehr (beispielsweise acht) Verbindungselemente enthalten. Durch die erfindungsgemäße Anwendung der Hexapod-Anordnung im Zusammenhang mit einem Bedienungselement wird es möglich, die Handhabe und mit ihr die Plattform in sechs Freiheitsgraden zu bewegen und die Bewegungsabläufe in eindeutiger Weise in Steuersignale umzusetzen. Die Handhabe lässt sich beispielsweise in zwei Richtungen seitlich verschwenken, um ihre Achse verdrehen, sich seitlich in zwei Richtungen verschieben und in Richtung ihrer Achse heraus- und hineinschieben. Sofern Kraftmessgeber eingesetzt werden, können die Bewegungen der Handhabe so klein sein, dass sie von der Bedienungsperson nicht wahrgenommen werden. In diesem Fall wird die Bedienungsperson zur Einstellung von Steuerbefehlen nicht eine bestimmte räumliche Verstellung der Handhabe vornehmen, sondern Kräfte auf die Handhabe ausüben, die den gewünschten Steuersignalen entsprechen. Eine derart vielseitige Betätigung einer Handhabe ist mit den bisher bekannten Bedienungselementen nicht möglich.It is particularly advantageous to use the connecting elements according to Art to arrange a hexapod. Hexapods are basic are known and are used, for example, in measuring devices Checking the position accuracy of machine tools (DE-A-35 04 464), for motorized coordinate measuring machines (DE-A-197 20 049) and used in robot kinematics. Under hexapod an arrangement of connecting elements is to be understood, which enables movements in six degrees of freedom. The hexapod can have six or more (for example eight) fasteners contain. By using the hexapod arrangement according to the invention in connection with an operating element it will possible, the handle and with it the platform in six Degrees of freedom to move and the movements in unambiguously implemented in control signals. The handle can be moved laterally in two directions, for example swivel, twist around its axis, laterally in two Shift directions and out in the direction of their axis Push. If force sensors are used, the movements of the handle must be so small that they Operator are not noticed. In this case the operator for setting control commands does not carry out a certain spatial adjustment of the handle, but exert forces on the handle that the desired Control signals. Such a versatile activity a handle is with the previously known controls not possible.
Die Erfindung lässt sich für die Steuerung von Mechanismen mit mehr als zwei Freiheitsgraden einsetzen. Ein bevorzugter Anwendungsfall ergibt sich im Zusammenhang mit einer Anbauschnittstelle zur Kopplung von Arbeitsgeräten an ein Arbeitsfahrzeug, wie es in der nachveröffentlichten DE-A-199 51 840 beschrieben ist. Bei der beschriebenen Anbauschnittstelle sind zwischen einem Traktorrumpf und einem Koppelrahmen sechs nach Art eines Hexapoden angeordnete Hydraulikzylinder vorgesehen. Diese Hydraulikzylinder können durch das erfindungsgemäße Bedienungselement angesteuert werden, indem die Signale jedes Wegmessgebers bzw. Kraftmessgebers des Bedienungs-Hexapoden zur Ansteuerung eines entsprechenden Hydraulikzylinders des Anbauschnittstellen-Hexapod herangezogen wird.The invention can be used for the control of mechanisms Use more than two degrees of freedom. A preferred one Use case arises in connection with a Attachment interface for coupling work tools to a Work vehicle, as it is in the subsequently published DE-A-199 51 840 is described. With the mounting interface described there are six between a tractor body and a coupling frame Hydraulic cylinders arranged in the manner of a hexapod intended. These hydraulic cylinders can by Control element according to the invention can be controlled by the signals of each encoder or force transducer Operating hexapods for controlling a corresponding one Hydraulic cylinder of the add-on interface hexapod becomes.
Ein weiterer Anwendungsfall der Erfindung liegt im Computerbereich, bei dem das Bedienungselement als sogenannte "dreidimensionale Maus" verwendet wird und der Ansteuerung virtueller räumlicher Bewegungsabläufe dient, die beispielsweise auf einem Bildschirm sichtbar gemacht werden können. Another application of the invention lies in Computer area, in which the control element as a so-called "three-dimensional mouse" is used and the control serves virtual spatial movements, for example can be made visible on a screen.
Gemäß einer bevorzugten Ausgestaltung der Erfindung sind die Verbindungselemente teleskopartig ausgebildet und bilden Teleskopbeine, die vorzugsweise nach Art eines Hexapoden angeordnet sind. Jedes Teleskopbein enthält beispielsweise zwei in ihrer Längserstreckung relativ zueinander verschiebbare Teleskopstangen, deren freie Enden allseitig schwenkbar an der Plattform beziehungsweise an der Konsole angreifen, wobei die Angriffspunkte jeweils im Bereich der Eckpunkte eines Dreiecks liegen können. Die Teleskopbeine sind mit Wegmessgeber ausgestattet, deren Längensignale der jeweiligen Länge des zugehörigen Teleskopbeins entsprechen.According to a preferred embodiment of the invention Connecting elements formed telescopically and form Telescopic legs, preferably in the manner of a hexapod are arranged. For example, each telescopic leg contains two longitudinally displaceable relative to each other Telescopic rods, the free ends of which can be pivoted on all sides Attack platform or on the console, the Attack points in the area of the corner points of a triangle can lie. The telescopic legs are with position encoders equipped, the length signals of the respective length of the corresponding telescopic leg correspond.
Dabei kann jedes Teleskopbein beispielsweise ein zu beiden Seiten hin offenes Zylindergehäuse aufweisen, das auf jeder Seite eine verschiebbare Teleskopstange aufnimmt. Die Teleskopstangen werden durch Federn in ihrer Mittelstellung abgestützt. Durch eine Betätigung des Bedienungshebels gegen die Kraft der Federn lassen sich die Längen der Federbeine verändern. Wird der Bedienungshebel losgelassen, kehrt die Plattform und mit ihr der Bedienungshebel in die Mittelstellung zurück. Alternativ oder ergänzend zu den Federn können die Teleskopstangen auch jeweils über einen Reibsitz in dem Zylindergehäuse geführt sein, so dass für eine Längsverschiebung Reibungskräfte überwunden werden müssen.Each telescopic leg can be one to both, for example Have open cylinder housing on each side Side holds a sliding telescopic rod. The Telescopic rods are held in their central position by springs supported. By actuating the operating lever against the force of the springs can be the lengths of the struts change. When the operating lever is released, the Platform and with it the operating lever in the middle position back. Alternatively or in addition to the springs, the Telescopic rods also each have a friction seat in the Cylinder housing to be guided, so that for a Longitudinal displacement friction forces must be overcome.
Bei den Wegmessgebern kann es sich um ohmsche Schiebewiderstände handeln. Es ist jedoch auch möglich, beispielsweise induktive, kapazitive oder optoelektronische Wegaufnehmer zu verwenden.The position encoders can be ohmic Act sliding resistors. However, it is also possible for example inductive, capacitive or optoelectronic To use displacement transducers.
Gemäß einer weiteren bevorzugten Ausgestaltung der Erfindung sind die Verbindungselemente in ihrer Längserstreckung im wesentlichen starr ausgebildet sind, so dass sie durch Ausübung axialer Kräfte weder länger noch kürzer werden. Die durch Betätigungen der Handhabe auf die Verbindungselemente übertragenen Zug- und Druckkräfte werden durch Kraftmessgeber gemessen. Als Kraftmessgeber kommen beispielsweise Dehnmessstreifen oder piezoelektrische Aufnehmer in Betracht.According to a further preferred embodiment of the invention are the connecting elements in their longitudinal extent in are essentially rigid so that they can be exercised axial forces are neither longer nor shorter. By Actuations of the handle on the connecting elements The tensile and compressive forces are transmitted by force transducers measured. For example, come as a force transducer Strain gauges or piezoelectric sensors.
Die Angriffspunkte der Verbindungselemente an der Plattform und/oder an der Konsole liegen vorzugsweise in etwa im Bereich der Ecken jeweils eines gleichseitigen Dreiecks. Dabei sind in der Nähe jeder Ecke zwei Verbindungselemente angelenkt, und lassen sich jeweils in zwei Richtungen verschenken. Es kann jedoch auch zweckmäßig sein, die Anlenkstellen in etwa in den Ecken eines Vierecks oder eines Sechsecks oder in einer anderen geometrischen Figur anzuordnen. Bei einem Viereck können beispielsweise jeweils zwei Verbindungselemente an zwei benachbarten Ecken des Vierecks angreifen, und jeweils eines oder jeweils zwei der übrigen Verbindungselemente an den anderen beiden Ecken des Vierecks angelenkt sein.The attachment points on the platform and / or on the console are preferably approximately in the range the corners of an equilateral triangle. Here are in two connecting elements are articulated near each corner, and can be given away in two directions. It can However, it should also be appropriate to the articulation points in about Corners of a rectangle or a hexagon or in another arrange geometric figure. With a square you can for example, two connecting elements on two attack adjacent corners of the square, and one each or two each of the other connecting elements to the other two corners of the square.
Um zu vermeiden, dass Biegekräfte auf die Verbindungselemente übertragen werden ist es zweckmäßig die Verbindungselemente gelenkig mit der Plattform und/oder gelenkig mit der Konsole zu verbinden. Infolge der gelenkigen Anbindung treten in den Verbindungselementen lediglich Zug- und Druckkräfte auf, so dass die Struktur statisch bestimmt bleibt. Die Kräfte können durch Kraftmessgeber oder durch Messung einer Längenänderung der Verbindungselemente erfasst werden.To avoid bending forces on the fasteners it is expedient to transfer the connecting elements articulated with the platform and / or articulated with the console connect. As a result of the articulated connection Fasteners only tensile and compressive forces, so that the structure remains statically determined. The powers can by force transducers or by measuring a change in length of the connecting elements are detected.
Insbesondere bei der Verwendung von Kraftmessgebern ist es von Vorteil, die Verbindungselemente starr an der Konsole zu befestigen und gelenkig mit der Plattform zu verbinden. Vorzugsweise werden für die gelenkigen Verbindungen jeweils ein oder mehrere gummiartige Elemente verwendet, die ein seitliches Verkippen der Verbindungselemente gegenüber der Plattform zulassen, jedoch ausreichend starr sind, um Zug- und Druckkräfte zu übertragen. Especially when using force transducers it is of Advantage, the connecting elements rigidly on the console too attach and articulate to the platform. Preferably one for each of the articulated connections or more rubber-like elements used that have a side Tilting of the connecting elements in relation to the platform allow, but are sufficiently rigid to pull and To transmit pressure forces.
Eine besonders bevorzugte Weiterbildung der Erfindung sieht vor, dass die Plattform Biegeelemente enthält, an denen jeweils ein starres Verbindungselement angreift und die sich bei Kraft- oder Momentbelastungen der Handhabe verbiegen.A particularly preferred development of the invention provides before that the platform contains bending elements, each of which attacks a rigid connecting element and which or bend momentary loads on the handle.
Die Biegeelemente sind vorzugsweise stab- oder laschenförmig ausgebildet und mit wenigstens einem Ende starr mit der Plattform verbunden. Sie sind quer zur Längserstreckung der Verbindungselemente ausgerichtet. Der Begriff quer schließt neben einer rechtwinkligen Ausbildung auch andere Winkel zwischen den Ausrichtungen des Biegeelements und des Verbindungselements ein. Zweckmäßigerweise sind die Biegeelemente lediglich mit einem ihrer Enden mit der Plattform verbunden und stehen mit ihrem anderen, freien Ende seitlich von der Plattform ab.The bending elements are preferably rod or tab-shaped trained and rigid with at least one end with the Platform connected. They are transverse to the longitudinal extension of the Fasteners aligned. The term crosswise closes in addition to a right-angled formation also other angles between the orientations of the bending element and the Connecting element. These are expediently Bending elements with only one of their ends with the platform connected and stand laterally with their other, free end from the platform.
Sofern im Bereich der Ecken einer beispielsweise dreieckförmigen Plattform jeweils zwei oder mehr Verbindungselemente angreifen, ist es vorteilhaft, im Bereich der Ecke jeweils zwei oder mehr als Biegeelement ausgebildete nebeneinander und im wesentlichen parallel zueinander verlaufende Stäbe oder Laschen vorzusehen. Im Bereich des freien Endes jedes Stabes oder jeder Lasche greift ein Verbindungselement an. Die Laschen lassen sich beispielsweise derart ausbilden, dass die Plattform in ihren Ecken geschlitzt wird und die Schlitze im wesentlichen zur Plattformmitte ausgerichtet sind.If, for example, in the area of the corners triangular platform two or more each Attack fasteners, it is advantageous in the area the corner each formed two or more as a bending element side by side and essentially parallel to each other to provide running rods or tabs. In the area of free end of each rod or tab engages Connecting element. The tabs can be, for example form such that the platform slits in its corners and the slots essentially to the center of the platform are aligned.
Vorzugsweise ist wenigstens auf der Oberseite oder auf der Unterseite eines Biegeelementes (z. B. einer Laschen) im Bereich zwischen der Befestigungsstelle des Verbindungselements und dem mittleren Bereich der Plattform ein im wesentlichen in radialer Richtung, also zur Plattformmitte, ausgerichteter Dehnmessstreifen angeordnet. Als Oberseite und Unterseite werden Oberflächen des Biegeelements bezeichnet, die im wesentlichen quer zur Längserstreckung der Verbindungselemente verlaufen.Preferably at least on the top or on the Underside of a bending element (e.g. a tab) in the Area between the attachment point of the connecting element and the central area of the platform is essentially in radial direction, i.e. towards the center of the platform Strain gauges arranged. As top and bottom are called surfaces of the bending element, which in essentially transverse to the longitudinal extension of the connecting elements run.
Um eine Temperaturkompensation und eine Signalverstärkung (Verdopplung) zu erreichen, ist es von Vorteil, sowohl auf der Oberseite als auch auf der Unterseite eines Biegeelements je wenigstens einen Dehnmessstreifen anzuordnen. Die beiden Dehnmessstreifen werden zu einer Halbbrücke verschaltet. Die Halbbrücke lässt sich verstärkerintern zu einer Vollbrücke ergänzen und liefert ein Ausgangssignal in Form einer Brückenverstimmung.Temperature compensation and signal amplification To achieve (doubling), it is beneficial to both on the Top as well as on the bottom of a bending element each to arrange at least one strain gauge. The two Strain gauges are connected to form a half bridge. The Half bridge can be integrated into a full bridge within the amplifier complete and provide an output signal in the form of a Bridge imbalance.
Die Brückenspannung kann einem Messverstärker zugeführt werden, der in einem Mikrocontroller integriert ist. Beispielsweise werden somit für sechs Verbindungselemente von sechs zugehörigen Messverstärkern sechs Ausgangsspannungen gebildet, die ein Maß für die in den Verbindungselementen auftretenden Kräfte sind. Der Mikrocontroller kann auch die gesamte Geometrieberechnung übernehmen. Er rechnet die Ausgangssignale in Kraft- und Momentenkomponenten um und gibt diese Daten über eine Busleitung, beispielsweise einen CAN-Bus aus. Der absolute Wert jeder Kraft- und Momentenkomponente ist ein Maß für die Geschwindigkeit, mit der sich das zu steuernde System bewegen soll. Die Richtungen der Kräfte geben die Richtung der Translation und die Richtung der Momente geben die Richtung der Drehung des Systems vor.The bridge voltage can be fed to a measuring amplifier which is integrated in a microcontroller. For example are thus for six connecting elements of six associated measuring amplifiers formed six output voltages, which is a measure of those occurring in the fasteners Powers are. The microcontroller can also do the whole Take over geometry calculation. It calculates the output signals into force and moment components and passes this data on a bus line, for example a CAN bus. The absolute The value of each force and moment component is a measure of that The speed at which the system to be controlled is moving should. The directions of the forces give the direction of the Translation and the direction of the moments give the direction of the System rotation.
Um eine zuverlässige Signalverarbeitung zu gewährleisten und Verdrahtungsaufwand einzusparen ist es zweckmäßig, auf der Plattform Kraftmesselemente und eine zugehörige Auswerteelektronik anzuordnen. Die Auswerteelektronik kann integrierte Halbleiterelemente aufweisen, wie es für Druck- und Beschleunigungssensoren üblich ist. To ensure reliable signal processing and To save wiring effort, it is useful on the Platform force measuring elements and associated evaluation electronics to arrange. The evaluation electronics can be integrated Have semiconductor elements as it is for printing and Accelerometers is common.
Es ist von Vorteil, die Handhabe bzw. den Handbedienungshebel des erfindungsgemäßen Bedienungselements nach Art eines Joysticks auszubilden. Bei der Formgebung und Anordnung des Joysticks können ergonomische Gesichtspunkte berücksichtigt werden.It is advantageous to use the handle or the hand control lever of the control element according to the type Train joysticks. In the design and arrangement of the Joysticks can take ergonomic considerations into account become.
Insbesondere ist es zweckmäßig, die Handhabe nach Art eines Winkelhebels auszubilden, bei dem ein Schenkel beispielsweise senkrecht von der Plattform absteht und der andere freie, im wesentlichen rechtwinklig abgelenkte Schenkel in etwa parallel zur Plattform verläuft. Der freie Schenkel steht in seiner unbetätigten Ruhelage nach oben und lässt sich durch eine Bedienungsperson bequem im Rahmen von sechs Freiheitsgraden betätigen.In particular, it is expedient to handle the type Training angle lever in which one leg, for example protrudes vertically from the platform and the other free, in essentially right-angled legs approximately parallel runs to the platform. The free leg is in his unactuated rest position upwards and can be Operator comfortably within six degrees of freedom actuate.
Um die Funktionsfähigkeit des erfinderischen Bedienungselements weiter zu steigern, ist gemäß einer bevorzugten Weiterbildung der Erfindung im Bereich des freien Endes der Handhabe wenigstens ein Steuerelement angeordnet. Es handelt sich hierbei beispielsweise um einen mit einem Finger oder dem Daumen betätigbaren Schalter oder Druckknopf, durch den ein elektrischer Schalter betätigt wird, oder um eine Rolle, die mit einem elektrischen Analoggeber in Verbindung steht. Es kann auch eine Aktivierungsklappe an der Handhabe montiert sein, wie sie beispielsweise in der DE-A-0 981 078 beschrieben wurde. Durch derartige Steuerelemente lassen sich Sicherheitsanforderungen erfüllen und weitere Funktionen ansteuern, ohne dass die Bedienungsperson ihre Hand von der Handhabe entfernen muss. Beispielsweise kann das Steuerelement derart in die Funktionsweise integriert sein, dass sich das zu steuernde System durch Betätigung der Handhabe nur dann bewegen lässt, wenn ein in der Handhabe integrierter Bedienungsschalter betätigt wird. Hierdurch lässt sich eine nicht beabsichtigte Betätigung des zu steuernden Systems, z. B. während der Fahrt, vermeiden. To the functionality of the inventive control element According to a preferred further training, further increasing of the invention in the area of the free end of the handle arranged at least one control element. It is about for example, one with a finger or the Thumb operated switch or push button through which a electrical switch is operated, or to a role that is connected to an electrical analog encoder. It can also an activation flap can be mounted on the handle, such as it was described for example in DE-A-0 981 078. Such controls allow security requirements fulfill and control other functions without that the operator remove their hand from the handle got to. For example, the control can be in the Functionality should be integrated that is to be controlled System can only be moved by operating the handle, if an operating switch integrated in the handle is operated. This allows an unintended one Actuation of the system to be controlled, e.g. B. while driving, avoid.
Vorzugsweise hängt die Ausgangskennlinie der Auswerteeinheit in nichtlinearerweise von den gemessenen Zug- oder Druckkräften ab, so dass bei einer linearen Biegekraftvergrößerung eine nichtlineare Bediengeschwindigkeit für das zu steuernde System vorgegeben wird. Durch entsprechende Beeinflussung der Ausgangskennlinie besteht auch die Möglichkeit, dem System eine Ansprechschwelle zu geben.The output characteristic of the evaluation unit preferably depends on non-linearly from the measured tensile or compressive forces so that with a linear increase in bending force a non-linear operating speed for the system to be controlled is specified. By influencing the Output characteristic there is also the possibility of giving the system a To give response threshold.
Aus den beispielweise sechs Messgrößen (gemessene Weg- oder Kraftgrößen) können durch Koordinatentransformationen die Kräfte oder Wege in einem beliebigen räumlichen Koordinatensystem errechnet werden. Insbesondere lassen sich die Kraftgrößen in den Hauptachsrichtungen des Handgriffs bestimmen. Aus diesen werden die Bewegungsgrößen (z. B. Sollgeschwindigkeiten in den jeweiligen Richtungen) der zu bedienenden Struktur berechnet. Ein mögliches Anwendungsgebiet auf dem das erfindungsgemäße Bedienungselement die Bedienung erleichtern kann, ist die Steuerung eines als Hexapod ausgebildeten Systems, beispielsweise das Hexapod-System der Anbauvorrichtung eines Arbeitsfahrzeugs.From the six measurement variables (measured distance or Force quantities) can be transformed through coordinate transformations Forces or paths in any spatial Coordinate system can be calculated. In particular, the force sizes in the main axis directions of the handle determine. From these, the movement quantities (e.g. Target speeds in the respective directions) serving structure is calculated. A possible area of application on which the control element according to the invention the operation can be easier is to control one as a hexapod trained system, for example the Hexapod system of Attachment device of a work vehicle.
Wird als zu steuerndes Systems ein System-Hexapod, beispielsweise ein Hexapod-Geräteanbau, verwendet, so kann es von Vorteil sein, die Geometrie des Bedienungselement-Hexapoden an die Geometrie des System-Hexapoden anzupassen, so dass diese zueinander ähnlich sind. Dabei können die Längenabmessungen und Anlenkstellen der Teleskopbeine in einem festen Verhältnis zu den Längenabmessungen und Anlenkstellen der Antriebselemente des System-Hexapoden stehen, so dass die Kinematik der beiden Hexapod-Anordnungen zueinander ähnlich oder identisch ist. Damit lassen sich durch die Auswerteeinheit Längen oder Längenänderungen der Teleskopbeine direkt auf die Antriebselemente, beispielsweise auf die Hydraulikzylinderhübe, des zu steuernden Systems übertragen und der Programmierungsaufwand für eine Steuereinheit verringern. If the system to be controlled is a system hexapod, for example, a hexapod device attachment, so it can be advantageous, the geometry of the control element hexapods to adapt to the geometry of the system hexapods so that this are similar to each other. The length dimensions and Articulation points of the telescopic legs in a fixed ratio to the length dimensions and articulation points of the drive elements of the system hexapods, so the kinematics of the two Hexapod arrangements are similar or identical to each other. With the evaluation unit lengths or Changes in length of the telescopic legs directly on the Drive elements, for example on the hydraulic cylinder strokes, of the system to be controlled and the Reduce programming effort for a control unit.
Für eine besonders bevorzugte Anwendung erzeugt die Auswerteeinheit Steuersignale, die der Ansteuerung einer Koppeleinrichtung, beispielsweise eines Kopplungsdreiecks, einer Fahrzeuganbauvorrichtung dienen. Die Bedienungsperson kann damit von dem Fahrzeugstand aus das Kopplungsdreieck beliebig bedienen, um Koppelvorgänge auszuführen oder das angebaute Gerät wunschgemäß zu bewegen. Das Bedienungselement kann z. B. auch der Ansteuerung eines Fahrzeugkrafthebers, beispielsweise eines Frontkrafthebers, dienen.For a particularly preferred application, the Evaluation unit control signals that control a Coupling device, for example a coupling triangle, serve a vehicle hitch. The operator can thus the coupling triangle from the vehicle position Operate as desired to carry out coupling processes or that to move the attached device as required. The control element can e.g. B. also the control of a vehicle power lift, for example, a front linkage.
Ein besonders bevorzugter Anwendungsfall für das erfindungsgemäße Bedienungselement liegt in der Fahrzeugsteuerung, bei der das Bedienungselement der Steuerung einer Fahrzeugkomponente dient. Hierfür ist es zweckmäßig, dass die Konsole des Bedienungselements Teil einer Fahrzeugkonsole, insbesondere Teil des Fahrzeugstands ist.A particularly preferred application for that Control element according to the invention is in the Vehicle control, in which the control element of the control serves a vehicle component. For this it is useful that the console of the control element part of a vehicle console, is in particular part of the vehicle position.
Anhand der Zeichnung, die zwei Ausführungsbeispiele der Erfindung zeigt, werden nachfolgend die Erfindung sowie weitere Vorteile und vorteilhafte Weiterbildungen und Ausgestaltungen der Erfindung näher beschrieben und erläutert.Using the drawing, the two embodiments of the Invention shows, the invention and others are hereinafter Advantages and advantageous developments and refinements the invention described and explained in more detail.
- Fig. 1Fig. 1
- die perspektivische Darstellung eines ersten erfindungsgemäßen Bedienungselements, das an einer Fahrzeugkonsole montiert ist,the perspective view of a first control element according to the invention a vehicle console is mounted,
- Fig. 2Fig. 2
- die Heckansicht eines Traktors mit einer Anbauschnittstelle zur Kopplung von Arbeitsgeräten und einem erfindungsgemäßen Bedienungselement,the rear view of a tractor with a Interface for coupling Tools and an inventive Operating element,
- Fig. 3Fig. 3
- die perspektivische Darstellung eines zweiten erfindungsgemäßen Bedienungselements, das auf einer Befestigungsplatte montiert ist, undthe perspective view of a second Control element according to the invention, on a mounting plate is mounted, and
- Fig. 4Fig. 4
- eine elektrische Schaltungsanordnung für die Messsignalverarbeitung.an electrical circuit arrangement for the Measurement signal processing.
Gemäß Fig. 1 ist an einer Plattform 10 ein joystickartiger
Bedienungshebel 12 befestigt, der sich in seiner nicht
betätigten Ruhestellung befindet. Der Bedienungshebel 12 weist
zwei im wesentlichen senkrecht zueinander verlaufende Schenkel
14, 16 auf, von denen ein erster Schenkel 14 im wesentlichen
senkrecht von der Plattform 10 absteht und ein zweiter Schenkel
16 nach oben abgewinkelt ist. Der zweite Schenkel 16 ist ein
ergonomisch ausgebildeter Bedienungsgriff und lässt eine
bequeme Bedienung zu.1 is a joystick-like on a
Die Plattform 10 ist im wesentlichen als gleichseitiges Dreieck
ausgebildet, wobei eine Ecke des Dreiecks oben liegt. Ungefähr
im Bereich jeder Ecke dieses Dreiecks greifen je zwei als
Teleskopbeine 18, 20, 22, 24, 26, 28 ausgebildete Verbindungselemente
an. Die jeweils anderen Enden der Teleskopbeine 18,
20, 22, 24, 26, 28 sind an einer lediglich teilweise
dargestellten Fahrzeugkonsole 30 angelenkt, wobei die
Anlenkstellen ebenfalls im wesentlichen ein gleichseitiges
Dreieck bilden, das jedoch gegenüber dem Plattformdreieck um
60° verdreht ist, so dass eine Ecke dieses Dreiecks unten
liegt. Die Anlenkstellen zwischen den Teleskopbeinen 18, 20,
22, 24, 26, 28 und der Plattform 10 bzw. der Konsole 30 lassen
ein allseitiges Verschwenken der Teleskopbeine 18, 20, 22, 24,
26, 28 zu.The
Die Teleskopbeine 18, 20, 22, 24, 26, 28 sind nach Art eines
Hexapoden zwischen der Plattform 10 und der Konsole 30
angeordnet. Jedes Teleskopbein 18, 20, 22, 24, 26, 28 enthält
zwei in axialer Richtung gegeneinander verschiebbare
Teleskopstangen und einen nicht näher dargestellten
Wegmessgeber, der die relative Lage zwischen den beiden
Anlenkstellen des Teleskopbeins 18, 20, 22, 24, 26, 28 erfasst
und entsprechende Längensignale an eine Auswerteeinheit 32
abgibt.The
Am zweiten Schenkel 16 des Bedienungshebels 12 ist seitlich ein
Steuerelement in Form eines Druckschalters 33
(Aktivierungstaste) angeordnet. Um eine unbeabsichtigte Beeinflussung
des zu steuernden Systems 36 zu vermeiden, gibt die
Auswerteeinheit 32 nur dann Signale an das zu steuernde System
36 ab, wenn der Druckschalter 33 betätigt ist.On the
Aus Fig. 2 geht hervor, dass das Bedienungselement 34 auf einer
rechten Konsole 30 in der Fahrzeugkabine angeordnet ist, wo es
für die Bedienungsperson gut zugänglich ist. Im Heck des
Fahrzeugs ist eine Anbauschnittstelle 36 zur Kopplung von
Arbeitsgeräten dargestellt, wie sie in der nachveröffentlichten
DE-A-199 51 840 im einzelnen beschrieben ist. Die
Anbauschnittstelle 36 enthält einen Kopplungsrahmen 38 mit
Haken 40 zur Befestigung von nicht dargestellten
Arbeitsgeräten. Zwischen dem Kopplungsrahmen 38 und dem
Traktorrumpf 42 erstrecken sich sechs Hydraulikzylinder 44, 46,
48, 50, 52, 54, die nach Art eines Hexapoden angeordnet und
betätigt werden. Die räumliche Anlenkung der Hydraulikzylinder
und deren Längenabmessungen stehen in einem festen
Proportionalverhältnis zu den räumlichen Anlenkpunkten und
Längenabmessungen der Teleskopbeine 18, 20, 22, 24, 26, 28 des
Bedienungselements 34.2 that the
Diese Geometrie erleichtert die Ansteuerung der
Anbauschnittstelle 36, deren Lage und Bewegung der Lage und
Bewegung des Bedienungselements 34 folgen soll. Bei der
Ansteuerung ermittelt die Auswerteeinrichtung 32 den Messwert
jedes Wegmessgebers und gibt proportionale Steuersignale an die
den Wegmessgebern entsprechenden Hydraulikzylinder 44, 46, 48,
50, 52, 54 ab. Beispielsweise wird das Messsignal des
Teleskopbeins 20 durch die Auswerteeinrichtung 32 in ein
Steuersignal für den Hydraulikzylinder 46 umgewandelt.This geometry makes it easier to control the
Mounting
Aus Fig. 3 geht eine zur Fig. 1 alternative Ausgestaltung eines
Bedienungselements hervor. Die zwischen einer im wesentlichen
dreieckförmigen Plattform 60 und einer Befestigungsplatte 62
angeordneten Verbindungselemente sind hier nicht teleskopartig
ausgebildet, wie in Fig. 1 dargestellt. Vielmehr handelt es
sich in Fig. 3 um starre Verbindungsstäbe 64, 66, 68, 70, 72,
74. Ähnlich wie bei Fig. 1 sind die Verbindungsstäbe 64, 66,
68, 70, 72, 74 im Eckbereich gleichseitiger Dreiecke
angeordnet. Sie sind jedoch mit der Befestigungsplatte starr
verbunden und stehen mit der Plattform über je ein Gummielement
76, das eine gelenkige Verbindung bildet, in Verbindung.3 shows an alternative embodiment to that of FIG
Control element out. The one in between
In der Mitte der ebenen Plattform 60 ist ein senkrecht zur
Plattform 60 ausgerichteter Handgriff 78 befestigt, der
lediglich schematisch dargestellt wurde, bei dem es sich
jedoch, wie bereits anhand Fig. 1 beschrieben, ebenfalls um
eine ergonomisch ausgebildete Handhabe mit zusätzlichen
Betätigungselementen handeln kann.In the middle of the
Im Bereich der drei Ecken der Plattform 60 sind jeweils zwei
parallel zueinander ausgerichtete Laschen 80 ausgebildet, die
durch jeweils einen Schlitz 82 voneinander getrennt sind. Die
Laschen 80 und Schlitze 82 sind zur Mitte der Plattform 60,
also zum Handgriff 78, hin ausgerichtet. An den freien Enden
der Laschen 80 ist je ein Ende eines Verbindungsstabes 64, 66,
68, 70, 72, 74 unter Zwischenschaltung eines Gummielements 76
befestigt. In the area of the three corners of the
Wie aus Fig. 3 ersichtlich ist auf der Oberseite jeder Lasche
80 ein oberer Dehnmessstreifen 84 befestigt. Die
Dehnmessstreifen 84 sind parallel zu den Laschen 80 mit ihrer
Längserstreckung auf die Plattformmitte hin ausgerichtet. Die
Dehnmessstreifen 84 sind in einem Bereich der jeweiligen Lasche
80 angeordnet, der zwischen dem Gummielement 76 und dem der
Plattformmitte zugewandten Ende des Schlitzes 82 liegt. Kräfte,
die bei einer Betätigung des Handgriffs 78 von einer Lasche 80
auf den zugehörigen starren Verbindungsstab 64, 66, 68, 70, 72,
74 ausgeübt werden, führen zu einer entsprechenden Verbiegung
der Lasche 80 nach oben oder unten und damit zu einer
entsprechenden Widerstandsänderung des Dehnmessstreifens 84.As can be seen from Fig. 3 is on the top of each
Auf der zur sichtbaren Plattformvorderseite gegenüberliegenden
Rückseite jeder Lasche 80 befindet sich gegenüber zum oberen
Dehnmessstreifen 84 jeweils ein unterer, in Fig. 3 nicht
sichtbarer, jedoch in Fig. 4 dargestellter Dehnmessstreifen 86.On the opposite side of the visible platform
The back of each
Wie aus Fig. 4 hervorgeht, sind jeweils ein vorderseitiger
Dehnmessstreifen 84 und ein rückseitiger Dehnmessstreifen 86 in
einer Halbbrücke zusammengeschaltet. Die Halbbrücke ist durch
drei Ergänzungswiderstände 88, 90, 98 zu einer Vollbrücke
ergänzt. Bei dem Widerstand 98 handelt es sich um einen
verstellbaren Widerstand, durch welchen ein manueller, grober
Nullabgleich der Brückenschaltung vorgenommen werden kann. An
die hintereinander in Reihe geschalteten Dehnmessstreifen 84,
86 ist eine Brückenspeisespannung US angelegt. Die Brücke
liefert an einem Mittelabgriff zwischen den beiden
Dehnmessstreifen 84, 86 einerseits und an einem Mittelabgriff
zwischen den beiden Ergänzungswiderständen 88, 90 andererseits
eine Brückenspannung UB in Form einer Brückenverstimmung. Die
Anordnung der Dehnmessstreifen 84, 86 in einer Brückenschaltung
hat eine Temperaturkompensation zwischen Vorder- und Rückseite
der Plattform 60 zur Folge. Durch die Verwendung zweier
Dehnmessstreifen 84, 86 je Lasche 80 ergibt sich des weiteren
eine Verdoppelung des Ausgangssignals gegenüber lediglich einem
Dehnmessstreifen.As can be seen from FIG. 4, a
Die Brückenspannung UB wird durch einen Messverstärker 92
verstärkt und dann einer Eingangssignalaufbereitung 94
zugeführt. Die Eingangssignalaufbereitung 94 steht mit einer
Nullabgleichvorrichtung 96 in Verbindung. Bei der
Nullausgleichsvorrichtung kann es sich um ein entsprechendes
Programmteil handeln. Durch den integrierten Nullabgleich
lassen sich Drifts des Messverstärkers 92 sowie kleine
plastische Änderungen des Systems bzw. Spannungsschwankungen
automatisch ausgleichen. Der automatische Nullabgleich wird nur
dann durchgeführt, wenn keine Betätigung des Bedienungselements
erfolgen soll und daher ein am Betätigungsgriff 78 angeordneter
Aktivierungsschalter nicht betätigt wird. Die Ausgangsspannung
UA der Eingangssignalaufbereitung 94 ist ein Maß für die Kraft
in dem jeweiligen Verbindungsstab 64, 66, 68, 70, 72, 74. Für
jedes Dehnungsmessstreifenpaar 84, 86 wird eine Ausgangsspannung
UA bereitgestellt.The bridge voltage U B is amplified by a measuring
Die Ausgangsspannungen UA aller Dehnungsmessstreifenpaare 84,
86, von denen in Fig. 4 nur eines dargestellt wurde, werden
einer Geometrieberechnungseinheit 100 zugeführt, durch welche
die Messsignale in Kraft- und Momentenkomponenten umgerechnet
werden. Die Berechnung der Kraftkomponenten Fx, Fy und Fz und
der Momentkomponenten Mx, My und Mz erfolgt auf übliche Weise
durch Koordinatentransformation aus der jeweiligen Geometrie
(Richtung) der Verbindungsstäbe 84, 86, 88, 90, 92, 94 und den
Kraftmesswerten der Dehnungsmessstreifen 84, 86. Nach der
Umrechnung liegen folgende Daten vor: Kraft Fx in x-Richtung,
Kraft Fy in y-Richtung, Kraft Fz in z-Richtung, Moment Mx um die
x-Achse, Moment My um die y-Achse und Moment Mz um die z-Achse.
Die Größe der Kräfte ist dabei ein Maß für die Geschwindigkeit,
mit der das zu steuernde System bewegt werden soll, während die
Richtung der Kräfte die Richtung der Translation widerspiegelt
und die Richtung der Momente die Richtung der Drehung des
Systems widerspiegeln.The output voltages U A of all pairs of
Die Ausgangssignale der Geometrieberechnungseinheit 100 werden
in einer Ausgangssignalaufbereitung 102, die mit einem
Kennlinienspeicher 104 in Verbindung steht, entsprechend der
bereitgestellten Kennlinien einer nicht linearen Umwandlung
unterzogen und über einen nicht gezeigten Stecker auf einen
CAN-Bus 106 ausgegeben. Durch die Ausgangssignalaufbereitung
102 wird eine Signalausgabe nur dann zugelassen, wenn eine
Betätigung des Bedienungselements erfolgen soll und daher ein
am Betätigungsgriff 78 angeordneter Aktivierungsschalter
betätigt ist.The output signals of the
Die jedem Dehnmessstreifenpaar 84, 86 zugeordneten
Ergänzungswiderstände 88, 90, 98 Verstärker 92,
Einganssignalaufbereitungen 94 und Nullabgleichvorrichtungen 96
sind gemeinsam mit der Geometrieberechnungseinheit 100, der
Ausgangssignalaufbereitung 102 und dem Kennlinienspeicher 104
zu einem gemeinsamen integrierten Bauelement 108 zusammengefasst.
Dieses Bauelement 108 ist vorzugsweise auf der
Rückseite der Plattform 60 befestigt. Es kann jedoch auch
zweckmäßig sein, das Bauelement 108 in einem externen
Controllergehäuse unterzubringen.The assigned to each pair of
Auch wenn die Erfindung lediglich anhand zweier Ausführungsbeispiele beschrieben wurde, erschließen sich für den Fachmann im Lichte der vorstehenden Beschreibung sowie der Zeichnung viele verschiedenartige Alternativen, Modifikationen und Varianten, die unter die vorliegende Erfindung fallen.Even if the invention is only based on two Exemplary embodiments have been described, open up for the expert in the light of the above description and the Drawing many different alternatives, modifications and variants which fall under the present invention.
Claims (22)
dadurch gekennzeichnet, dass Verbindungselemente (64, 66, 68, 70, 72, 74) in ihrer Längserstreckung im wesentlichen starr ausgebildet sind. Control element according to one of claims 1 to 3,
characterized in that connecting elements (64, 66, 68, 70, 72, 74) are essentially rigid in their longitudinal extent.
dadurch gekennzeichnet, dass die Angriffspunkte der Verbindungselemente (18, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) an der Plattform (10, 60) und/oder an der Konsole (30, 62) jeweils im Bereich der Ecken eines im wesentlichen gleichseitigen Dreiecks liegen und dass im Bereich jeder der drei Ecken jeweils zwei Verbindungselemente (18, 20, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) angreifen.Control element according to one of claims 1 to 4,
characterized in that the points of engagement of the connecting elements (18, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) on the platform (10, 60) and / or on the console (30, 62) each lie in the area of the corners of an essentially equilateral triangle and that two connection elements (18, 20, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) engage in the area of each of the three corners.
dadurch gekennzeichnet, dass die Verbindungselemente (18, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) gelenkig mit der Plattform (10, 60) und/oder gelenkig mit der Konsole (30) verbunden sind.Control element according to one of claims 1 to 5,
characterized in that the connecting elements (18, 22, 24, 26, 28; 64, 66, 68, 70, 72, 74) are articulated to the platform (10, 60) and / or articulated to the console (30) ,
dadurch gekennzeichnet, dass die Verbindungselemente (64, 66, 68, 70, 72, 74) starr an der Konsole (62) befestigt sind.Control element according to one of claims 1 to 5,
characterized in that the connecting elements (64, 66, 68, 70, 72, 74) are rigidly attached to the bracket (62).
dadurch gekennzeichnet, dass die gelenkige Verbindung zwischen einem Verbindungselement (64, 66, 68, 70, 72, 74) und der Plattform (60) durch ein oder mehrere gummiartige Elemente (76) gebildet wird.Control element according to one of claims 6 to 7,
characterized in that the articulated connection between a connecting element (64, 66, 68, 70, 72, 74) and the platform (60) is formed by one or more rubber-like elements (76).
dadurch gekennzeichnet, dass die Plattform (60) Biegeelemente (80) enthält, an denen jeweils ein starres Verbindungselement (64, 66, 68, 70, 72, 74) angreift und die sich bei Kraft- oder Momentbelastungen der Handhabe (78) verbiegen. Control element according to one of claims 1 to 8,
characterized in that the platform (60) contains bending elements (80), each of which a rigid connecting element (64, 66, 68, 70, 72, 74) engages and which bend when the handle (78) is subjected to force or moment loads.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10052050 | 2000-10-20 | ||
| DE2000152050 DE10052050A1 (en) | 2000-10-20 | 2000-10-20 | Operating element has operator handle on platform, connecting elements between platform, bracket, displacement and/or force sensors, unit for evaluating signals and providing drive signals |
| DE10111609 | 2001-03-10 | ||
| DE2001111609 DE10111609A1 (en) | 2001-03-10 | 2001-03-10 | Operating element has operator handle on platform, connecting elements between platform, bracket, displacement and/or force sensors, unit for evaluating signals and providing drive signals |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1199622A1 true EP1199622A1 (en) | 2002-04-24 |
| EP1199622B1 EP1199622B1 (en) | 2007-12-12 |
Family
ID=26007434
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP01122079A Expired - Lifetime EP1199622B1 (en) | 2000-10-20 | 2001-09-14 | Operating element |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6681880B2 (en) |
| EP (1) | EP1199622B1 (en) |
| BR (1) | BR0104622A (en) |
| DE (1) | DE50113363D1 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1876505A1 (en) | 2006-07-03 | 2008-01-09 | Force Dimension S.à.r.l | Haptic device gravity compensation |
| US8667860B2 (en) | 2006-07-03 | 2014-03-11 | Force Dimension S.A.R.L. | Active gripper for haptic devices |
| CN105415350A (en) * | 2016-01-06 | 2016-03-23 | 武汉穆特科技有限公司 | Parallel-connected three-freedom-degree force feedback handle |
Families Citing this family (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0026357D0 (en) * | 2000-10-27 | 2000-12-13 | Makex Ltd | Improvements in parallel link machine design |
| US8414505B1 (en) | 2001-02-15 | 2013-04-09 | Hansen Medical, Inc. | Catheter driver system |
| EP1432555A2 (en) * | 2001-07-02 | 2004-06-30 | Microbotic A/S | Apparatus comprising a robot arm adapted to move object handling hexapods |
| EP1514257A4 (en) | 2002-04-12 | 2015-12-30 | Henry K Obermeyer | Multi-axis joystick and transducer means therefore |
| US6948398B2 (en) * | 2002-07-22 | 2005-09-27 | Deere & Company | Joystick with enabling sensors |
| DE10344029A1 (en) * | 2003-09-23 | 2005-04-14 | Still Gmbh | Multifunction lever and operating unit for a truck |
| US8069927B2 (en) * | 2004-07-28 | 2011-12-06 | Caterpillar Inc. | Rear-mounted work implement control system |
| DE102005019321A1 (en) * | 2005-04-26 | 2006-11-02 | Still Gmbh | Truck with a multi-function lever |
| US8392075B2 (en) * | 2008-02-25 | 2013-03-05 | Clark Equipment Company | Carrier and backhoe control system and method |
| US9161817B2 (en) | 2008-03-27 | 2015-10-20 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US20090248042A1 (en) * | 2008-03-27 | 2009-10-01 | Kirschenman Mark B | Model catheter input device |
| US8219909B2 (en) * | 2009-01-26 | 2012-07-10 | Honeywell International Inc. | Human-machine interface with integrated position sensors and passive haptic feedback devices |
| US20130317519A1 (en) | 2012-05-25 | 2013-11-28 | Hansen Medical, Inc. | Low friction instrument driver interface for robotic systems |
| US9026312B2 (en) * | 2012-08-29 | 2015-05-05 | Caterpillar Inc. | Ergonomics test buck |
| US9668814B2 (en) | 2013-03-07 | 2017-06-06 | Hansen Medical, Inc. | Infinitely rotatable tool with finite rotating drive shafts |
| US9173713B2 (en) | 2013-03-14 | 2015-11-03 | Hansen Medical, Inc. | Torque-based catheter articulation |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US20140277334A1 (en) | 2013-03-14 | 2014-09-18 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9498601B2 (en) | 2013-03-14 | 2016-11-22 | Hansen Medical, Inc. | Catheter tension sensing |
| US11213363B2 (en) | 2013-03-14 | 2022-01-04 | Auris Health, Inc. | Catheter tension sensing |
| US9408669B2 (en) | 2013-03-15 | 2016-08-09 | Hansen Medical, Inc. | Active drive mechanism with finite range of motion |
| US20140276936A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Active drive mechanism for simultaneous rotation and translation |
| US9452018B2 (en) | 2013-03-15 | 2016-09-27 | Hansen Medical, Inc. | Rotational support for an elongate member |
| US20140276647A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Vascular remote catheter manipulator |
| US9213333B2 (en) * | 2013-06-06 | 2015-12-15 | Caterpillar Inc. | Remote operator station |
| US9763741B2 (en) | 2013-10-24 | 2017-09-19 | Auris Surgical Robotics, Inc. | System for robotic-assisted endolumenal surgery and related methods |
| GB201322746D0 (en) * | 2013-12-20 | 2014-02-05 | Agco Int Gmbh | Agricultural implement connection control |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| US10569052B2 (en) | 2014-05-15 | 2020-02-25 | Auris Health, Inc. | Anti-buckling mechanisms for catheters |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| KR102569960B1 (en) | 2015-09-09 | 2023-08-24 | 아우리스 헬스, 인크. | Instrument device manipulator for a surgical robotics system |
| US10231793B2 (en) | 2015-10-30 | 2019-03-19 | Auris Health, Inc. | Object removal through a percutaneous suction tube |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US9983578B2 (en) * | 2016-04-20 | 2018-05-29 | Caterpillar Inc. | Remote operator station for a machine |
| US11209121B2 (en) * | 2016-04-26 | 2021-12-28 | The Boeing Company | Lifting support device and method of controlling operation |
| US10454347B2 (en) | 2016-04-29 | 2019-10-22 | Auris Health, Inc. | Compact height torque sensing articulation axis assembly |
| US9823686B1 (en) * | 2016-08-15 | 2017-11-21 | Clause Technology | Three-axis motion joystick |
| US9889874B1 (en) * | 2016-08-15 | 2018-02-13 | Clause Technology | Three-axis motion joystick |
| US11241559B2 (en) | 2016-08-29 | 2022-02-08 | Auris Health, Inc. | Active drive for guidewire manipulation |
| JP6853346B2 (en) | 2016-08-31 | 2021-03-31 | オーリス ヘルス インコーポレイテッド | Surgical instruments that maintain length |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| US10543048B2 (en) | 2016-12-28 | 2020-01-28 | Auris Health, Inc. | Flexible instrument insertion using an adaptive insertion force threshold |
| DE102017209707A1 (en) * | 2017-06-08 | 2018-12-13 | Kässbohrer Geländefahrzeug AG | Device for controlling movements of a front or rear attachment of a snow groomer and snow groomer |
| US11026758B2 (en) | 2017-06-28 | 2021-06-08 | Auris Health, Inc. | Medical robotics systems implementing axis constraints during actuation of one or more motorized joints |
| BR112020011444A2 (en) | 2017-12-11 | 2021-02-02 | Auris Health, Inc. | systems and methods for instrument-based insertion architectures |
| KR20200100613A (en) | 2017-12-14 | 2020-08-26 | 아우리스 헬스, 인코포레이티드 | System and method for estimating instrument position |
| AT520763B1 (en) * | 2017-12-21 | 2022-09-15 | Hans Kuenz Gmbh | crane control |
| EP3740150A4 (en) | 2018-01-17 | 2021-11-03 | Auris Health, Inc. | Surgical robotics systems with improved robotic arms |
| KR20210024472A (en) | 2018-06-27 | 2021-03-05 | 아우리스 헬스, 인코포레이티드 | Alignment and attachment system for medical devices |
| WO2020069080A1 (en) | 2018-09-28 | 2020-04-02 | Auris Health, Inc. | Devices, systems, and methods for manually and robotically driving medical instruments |
| WO2020197671A1 (en) | 2019-03-22 | 2020-10-01 | Auris Health, Inc. | Systems and methods for aligning inputs on medical instruments |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| WO2021064536A1 (en) | 2019-09-30 | 2021-04-08 | Auris Health, Inc. | Medical instrument with capstan |
| JP2023508718A (en) | 2019-12-31 | 2023-03-03 | オーリス ヘルス インコーポレイテッド | Advanced basket drive mode |
| USD1014568S1 (en) | 2022-02-14 | 2024-02-13 | Techtronic Cordless Gp | Lawn mower |
| USD1015381S1 (en) | 2022-02-14 | 2024-02-20 | Techtronic Cordless Gp | Lawn mower |
| US11789540B1 (en) | 2022-11-23 | 2023-10-17 | Kostal Of America, Inc. | Touch surface controller |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4125271A (en) * | 1976-06-11 | 1978-11-14 | Ro-Wi Rosenberg & Wilboltt I/S | Tool suspension |
| DE3504464C1 (en) | 1985-02-09 | 1986-04-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V., 8000 München | Transportable measuring instrument for testing the positional accuracy of a program-controlled appliance arm |
| US4589810A (en) * | 1982-10-30 | 1986-05-20 | Deutsche Forschungs- Und Versuchsanstalt Fuer Luft- Und Raumfahrt E.V. | Device for programming movements of a robot |
| US4641123A (en) * | 1984-10-30 | 1987-02-03 | Rca Corporation | Joystick control |
| US5451134A (en) * | 1991-10-22 | 1995-09-19 | Bryfogle; Mark D. | Material handling devices and controllers |
| US5767840A (en) * | 1996-06-28 | 1998-06-16 | International Business Machines Corporation | Six-degrees-of-freedom movement sensor having strain gauge mechanical supports |
| DE19720049A1 (en) | 1997-05-14 | 1998-11-19 | Leitz Brown & Sharpe Mestechni | Controlling motorised hexapod co-ordinate measuring equipment |
| EP0981078A2 (en) | 1998-08-17 | 2000-02-23 | Deere & Company | Manual control device |
| DE19951840A1 (en) | 1999-10-28 | 2001-05-10 | Deere & Co | Interface for coupling work equipment to a work vehicle |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3091130A (en) * | 1960-06-27 | 1963-05-28 | Morse Instr Co | Single lever control for multiple actions |
| US3432184A (en) | 1967-07-10 | 1969-03-11 | United States Steel Corp | Power actuated tractor hitch |
| US3904042A (en) * | 1974-02-25 | 1975-09-09 | Westinghouse Electric Corp | Manipulator apparatus |
| US4091234A (en) * | 1977-03-30 | 1978-05-23 | Atari, Inc. | Joystick with attached circuit elements |
| US4216467A (en) * | 1977-12-22 | 1980-08-05 | Westinghouse Electric Corp. | Hand controller |
| US4422345A (en) * | 1981-09-11 | 1983-12-27 | Deere & Company | Two-way control lever rotatable in cab wall for sound sealing |
| GB2183795B (en) * | 1985-12-03 | 1989-10-04 | Kubota Ltd | Valve control structure for working vehicle |
| JPS62235615A (en) * | 1986-04-04 | 1987-10-15 | Mitsubishi Precision Co Ltd | Six-axial control steering device |
| DE3824296A1 (en) * | 1987-11-30 | 1989-06-01 | Remote Control Systems Rcs | DEVICE FOR SWITCHING A MOTOR VEHICLE TRANSMISSION |
| US5116180A (en) * | 1988-07-18 | 1992-05-26 | Spar Aerospace Limited | Human-in-the-loop machine control loop |
| US4962448A (en) * | 1988-09-30 | 1990-10-09 | Demaio Joseph | Virtual pivot handcontroller |
| US5107080A (en) * | 1989-12-01 | 1992-04-21 | Massachusetts Institute Of Technology | Multiple degree of freedom damped hand controls |
| US5223776A (en) * | 1990-12-31 | 1993-06-29 | Honeywell Inc. | Six-degree virtual pivot controller |
| US5286024A (en) * | 1991-03-20 | 1994-02-15 | Atari Games Corporation | System for sensing the position of a joystick |
| US5263382A (en) * | 1992-04-13 | 1993-11-23 | Hughes Aircraft Company | Six Degrees of freedom motion device |
| US5767839A (en) * | 1995-01-18 | 1998-06-16 | Immersion Human Interface Corporation | Method and apparatus for providing passive force feedback to human-computer interface systems |
| WO1995027890A1 (en) * | 1994-04-11 | 1995-10-19 | Peter Neltoft | Device for use in manual control of the movement of a real or imaginary object |
| US5675359A (en) * | 1995-01-13 | 1997-10-07 | Advanced Technology Systems, Inc. | Joystick controller |
| US5589854A (en) * | 1995-06-22 | 1996-12-31 | Tsai; Ming-Chang | Touching feedback device |
| JPH09285988A (en) | 1995-12-29 | 1997-11-04 | Daewoo Electronics Co Ltd | Manipulator using wire and spool and capable of carrying out motion in six-degree of freedom and force feedback |
| US6329812B1 (en) * | 1996-12-04 | 2001-12-11 | Sundin Gmbh | Position measuring device for detecting displacements with at least three degrees of freedom |
| US5854622A (en) * | 1997-01-17 | 1998-12-29 | Brannon; Daniel J. | Joystick apparatus for measuring handle movement with six degrees of freedom |
| US6129155A (en) * | 1998-12-02 | 2000-10-10 | Caterpillar Inc. | Method and apparatus for controlling a work implement having multiple degrees of freedom |
| KR100334902B1 (en) * | 1999-12-06 | 2002-05-04 | 윤덕용 | 6 Degree-of-freedom Parallel Mechanism for Micro-positioning Task |
-
2001
- 2001-09-14 EP EP01122079A patent/EP1199622B1/en not_active Expired - Lifetime
- 2001-09-14 DE DE50113363T patent/DE50113363D1/en not_active Expired - Fee Related
- 2001-10-15 US US09/977,437 patent/US6681880B2/en not_active Expired - Fee Related
- 2001-10-19 BR BR0104622-5A patent/BR0104622A/en not_active IP Right Cessation
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4125271A (en) * | 1976-06-11 | 1978-11-14 | Ro-Wi Rosenberg & Wilboltt I/S | Tool suspension |
| US4589810A (en) * | 1982-10-30 | 1986-05-20 | Deutsche Forschungs- Und Versuchsanstalt Fuer Luft- Und Raumfahrt E.V. | Device for programming movements of a robot |
| US4641123A (en) * | 1984-10-30 | 1987-02-03 | Rca Corporation | Joystick control |
| DE3504464C1 (en) | 1985-02-09 | 1986-04-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V., 8000 München | Transportable measuring instrument for testing the positional accuracy of a program-controlled appliance arm |
| US5451134A (en) * | 1991-10-22 | 1995-09-19 | Bryfogle; Mark D. | Material handling devices and controllers |
| US5767840A (en) * | 1996-06-28 | 1998-06-16 | International Business Machines Corporation | Six-degrees-of-freedom movement sensor having strain gauge mechanical supports |
| DE19720049A1 (en) | 1997-05-14 | 1998-11-19 | Leitz Brown & Sharpe Mestechni | Controlling motorised hexapod co-ordinate measuring equipment |
| EP0981078A2 (en) | 1998-08-17 | 2000-02-23 | Deere & Company | Manual control device |
| DE19951840A1 (en) | 1999-10-28 | 2001-05-10 | Deere & Co | Interface for coupling work equipment to a work vehicle |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1876505A1 (en) | 2006-07-03 | 2008-01-09 | Force Dimension S.à.r.l | Haptic device gravity compensation |
| WO2008003417A1 (en) * | 2006-07-03 | 2008-01-10 | Force Dimension S.A.R.L. | Haptic device gravity compensation |
| US8188843B2 (en) | 2006-07-03 | 2012-05-29 | Force Dimension S.A.R.L. | Haptic device gravity compensation |
| US8667860B2 (en) | 2006-07-03 | 2014-03-11 | Force Dimension S.A.R.L. | Active gripper for haptic devices |
| CN105415350A (en) * | 2016-01-06 | 2016-03-23 | 武汉穆特科技有限公司 | Parallel-connected three-freedom-degree force feedback handle |
Also Published As
| Publication number | Publication date |
|---|---|
| BR0104622A (en) | 2002-05-28 |
| EP1199622B1 (en) | 2007-12-12 |
| US6681880B2 (en) | 2004-01-27 |
| DE50113363D1 (en) | 2008-01-24 |
| US20020117017A1 (en) | 2002-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1199622A1 (en) | Operating element | |
| EP0097191B1 (en) | Mounting robot | |
| DE102015004483B4 (en) | Robot controller and robot system for moving a robot in response to a force | |
| EP1980441B1 (en) | Control lever for a vehicle | |
| EP1506115B1 (en) | Force supporting module for providing a load-dependent supporting force | |
| DE4005343A1 (en) | HAND CONTROLLER FOR CONTROLLING MOVEMENTS OF A MECHANISM | |
| DE102015214170A1 (en) | Robot with a force measuring device | |
| DE102020203545A1 (en) | SELECTABLE SPEED OR POSITION BASED CONTROL SYSTEM FOR A WORK VEHICLE | |
| DE10120732A1 (en) | Interface between work vehicle and work equipment and control device | |
| EP0892256A1 (en) | Apparatus for detecting the weight of hinged loads | |
| DE102007001435A1 (en) | Adjustable steering column assembly | |
| EP1609346B1 (en) | Movable interface with multiple degrees of freedom | |
| EP2391874B1 (en) | Industrial truck | |
| EP1694162A1 (en) | Displaceable piece of furniture | |
| EP3343311B1 (en) | Operating lever with active feedback unit | |
| DE102010052237B4 (en) | Handle for detecting a force based on a photoelectric barrier and methods of use | |
| DE19625497C1 (en) | Operating element arrangement for control of longitudinal and transverse movement of motor vehicle | |
| DE102006053408A1 (en) | Pedal e.g. brake pedal, for vehicle i.e. motor vehicle, has pedal lever supported around rotational axis in rotatable manner, where distance between pad and rotation axis is varied based on characteristic curve during operation of pedal | |
| EP2378924B1 (en) | Trigger sensor for a furniture drive | |
| DE102018127921A1 (en) | Robot and method for determining a movement space using a robot | |
| DE60025235T2 (en) | SYSTEM FOR ADJUSTING THE STEERING POWER GRADIENTS OF A STICK COVER | |
| DE10111609A1 (en) | Operating element has operator handle on platform, connecting elements between platform, bracket, displacement and/or force sensors, unit for evaluating signals and providing drive signals | |
| EP1684159A2 (en) | Mobile haptic interface | |
| DE102020206568B4 (en) | Programming system for manually programming a movement of an industrial robot, industrial robot with such a programming system and method for manually programming a movement of an industrial robot | |
| DE10052050A1 (en) | Operating element has operator handle on platform, connecting elements between platform, bracket, displacement and/or force sensors, unit for evaluating signals and providing drive signals |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR Kind code of ref document: A1 Designated state(s): DE FR GB IT |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 20021024 |
|
| AKX | Designation fees paid |
Free format text: DE FR GB IT |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB IT |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REF | Corresponds to: |
Ref document number: 50113363 Country of ref document: DE Date of ref document: 20080124 Kind code of ref document: P |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20080207 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20080915 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20080925 Year of fee payment: 8 Ref country code: FR Payment date: 20080917 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20080929 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20080820 Year of fee payment: 8 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20090914 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20100531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20090930 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100401 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20090914 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20090914 |