
Wide-Range-Sensing Candle Soot/Elastomer Strain Sensors with High Sensitivity


State Key Laboratory of Bio-Fibers and Eco-Textiles, Institute of Marine Biobased Materials, College of Chemistry and Chemical Engineering, Qingdao University, Qingdao 266071, China
*
Author to whom correspondence should be addressed.
Coatings 2023, 13(6), 1010; https://doi.org/10.3390/coatings13061010
Submission received: 23 April 2023
/
Revised: 24 May 2023
/
Accepted: 25 May 2023
/
Published: 29 May 2023
(This article belongs to the Special Issue Graphite/Carbon: Surface Modification and Application)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Nowadays, flexible resistive strain sensors attract growing attention owing to their various applications in the fields of electronic skin, human health detection, body motion, etc. Unfortunately, to date, the fabrication of a high-sensitivity soft sensor under a wide-range strain through a simple and cost-competitive approach is still a challenge. In this work, a facile polymer-surface-swelling-adhesion approach was developed to fabricate bilayer candle soot/poly (styrene-b-ethylene-butylene-b-styrene) elastic strain sensors, which obtained a high sensitivity performance at a wide range of strain. When the surface density of candle soot was 0.42 mg/cm2, the gauge factor (GF) values of the sensor were 113, 77, and 177 for various strain ranges of 0%–9%, 9%–60%, and 60%–100%, respectively. The sensor could detect tiny strains such as 0.1% and demonstrated a sensing time of 265 ms at 10% strain. Moreover, after 1000 cyclic loading-unloading at 30% strain, the relative resistance variations remain stable. The sensing mechanism was explained by the tunnel effect for low and medium strain ranges and contact resistance change for the high strain range. As a further step, respiration with a surgical mask, body motion, and road roughness were successfully monitored by using the sensor.
1. Introduction
Recently, soft strain sensors have received great attention thanks to their diverse applications in the burgeoning fields of flexible electronic devices such as electronic skin [1], health monitoring [2,3], robots/actuators [4], human motion detection [5], and beyond [6,7]. Among the different types of strain sensors, resistive-type sensors based on elastic polymers such as polydimethylsiloxane (PDMS) [8], Ecoflex [9] and thermoplastic polyurethane (TPU) [10] are highly desirable owing to their direct signal acquisition, stretchability, and processability. When stretched, the deformation of the polymer-based sensor induces a resistance alteration at a specific strain. Generally, polymer-based soft sensors mainly include two types: polymer coated with conductive coatings [11,12,13,14] and polymer blended with conductive fillers [15,16]. Common conductive coating and filler include Ag [13,17], carbon black [18], carbon nanotube (CNT) [19], and graphene et al. [20,21]. Great efforts have been devoted to improving strain sensors towards three aspects: (i) sensors with both high sensitivity and stretchability [22,23]; (ii) sensors with ultrahigh sensitivity under ultralow strain (<1%) [8]; (iii) facile fabrication and low production cost [24]. Although one or two targets have been accomplished [24,25], unfortunately, few reported a fabricating strategy that satisfied all three of these conditions.
In order to prepare a high-performance sensor under a wide-range strain through a simple method with a low cost, two aspects need to be considered: (i) how to realize the high sensitivity of sensors under both low and high strain simultaneously; and then (ii) how to fabricate the sensor through a facile and inexpensive approach. Direct blending is a traditional process to prepare polymer composites containing conductive nanofillers. Sheng et al. [26] fabricated a porous fiber strain sensor through wet-spinning, using CNT and graphene as conductive fillers, TPU as the elastomer, and bacterial cellulose nanofibers as the dispersant and binding agent. The sensor could detect a broad strain range with gauge factor (GF) values of 17.8 (strain: 0%–70%), 326.6 (strain: 70%–150%), and 1501.0 (strain: 150%–230%). Unfortunately, the sensor sensitivity was relatively low in the low strain range (<10%). To detect tiny strain (1%), Wang et al. [27] reported an ultrasensitive gold/titanium-PDMS bilayer strain sensor through a pre-stretching method to generate micro-cracks in the metal layer. The strain sensor with micro-cracks could sense tiny vibrations (strain < 1%) with a high GF of ~5000. The working mechanism was explained to combine the overlap mode and tunnel effect. However, the sensitivity of the sensor declined at high strain. To date, the fabrication of a high-sensitivity sensor under a wide-range strain (strain < 1%, GF > 100; strain: 1%–100%, GF > 50) is still a challenge [28,29,30].
Here, we demonstrate a facile strategy to fabricate a highly sensitive and wide-range-sensing candle soot (CS)/elastomer strain sensor through a polymer-surface-swelling-adhesion approach. By this means, a conductive wrinkled CS coating was adhered to the poly (styrene-b-ethylene-butylene-b-styrene) (SEBS) surface. The design concept is based on the following consideration: (i) the surface of elastic thermoplastic SEBS can be swelled by n-hexane, which produces a viscous surface and can be applied to adhere CS nanoparticles; (ii) during the drying, the swelled SEBS surface contracts, inducing the emergence of wrinkles and micro-cracks in the CS layer, which raises the sensitivity of the sensor [31,32]; (iii) CS is a low-cost conductive nanofiller in comparison with Ag, CNT, and graphene etc. [17,19,20], and SEBS is an inexpensive elastomer in comparison with other elastomers such as PDMS [33]. The novelty of the paper is the achievement of highly sensitive wide-range-sensing by using zero-dimensional carbon nanomaterial, which was rarely achieved before. The key contribution of this study is the proposal of the polymer-surface-swelling-adhesion method and the corresponding wide-range-sensing mechanism of the sensor.
2. Materials and Methods
2.1. Materials
SEBS (YH-688, Mn = 1.5 × 105) was purchased from Baling Petrochemical Co., Ltd. (Yueyang, China). The soft SEBS sheet (thickness = 1.2 mm) was obtained by hot pressing at 130 °C under a pressure of 3 MPa. CS nanoparticles were homemade by vapor deposition of incompletely burned candles (Qingdao Allite-Radiance Candle Co., Ltd., Qingdao, China) onto an aluminum plate. The aluminum plate was strictly placed on the outer flame of the burning candle at a distance of 2 cm above the candle top (Figure S1a). Ethanol and n-hexane as solvents were bought from Sinopharm Chemical Reagent Co., Ltd. (Shanghai, China).
2.2. Preparation
Scheme 1 displays the typical preparation process of the CS/SEBS sensor. First, 0.015 g of CS powder was added to ethanol (10 mL) and the mixture was treated by ultrasonic dispersion for 1 h. Then, the black mixture was poured into a Teflon mold (60 mm × 60 mm × 15 mm) and dried at 60 °C for 3 h. After the ethanol was evaporated, a dried CS layer with a surface density of 0.42 mg/cm2 was obtained at the bottom of the mold. Second, a SEBS sheet (45 mm × 20 mm × 1.2 mm) was adhered onto a glass sheet, allowing its lower surface to be touched by n-hexane (23 mL) in a glass vessel below. After 10 min solvent-touching, one side of the SEBS turned to a swelling and viscous state [34]. Third, the SEBS was taken out and pressed onto the dried CS layer in the Teflon mold with the viscous surface towards the CS layer under 10 N pressure for 12 h. After the viscous SEBS surface became dry at room temperature, the CS/SEBS composite sample was stripped from the Teflon mold and cut into rectangular strips (5 mm × 40 mm). Finally, two copper conductive tapes were pasted onto the CS/SEBS strip with copper wires adhered to both ends [35]. The spacing of copper wires was 20 mm. The as-obtained sample was designated as CS-0.015/SEBS sensor. Followed by the same procedure, other samples with various CS contents (0.01 g and 0.02 g) in ethanol (10 mL) were fabricated and designated as CS-x/SEBS (x = 0.01 and 0.02).
2.3. Characterization
All the mechanical and electromechanical measurements were tested at room temperature using a universal mechanical tester (WDW-5T, Jinan HengRuiJin Testing Machine Co., Ltd., Jinan, China) and a digital multimeter (Keithley 2450, Keithley, Beaverton, OR, USA) after sample preparation. Unless otherwise specified, the test voltage was 3 V. During the demonstration of the application, a portable digital multimeter (UT61E, Uni-trend Technology Co., Ltd., Dongguan, China) and a laptop computer were used for real-time testing. All the CS morphologies were observed by a field-emission scanning electron microscope (FE-SEM, Regulus 8100, Hitachi, Tokyo, Japan). The chemical composition analysis of CS was measured by an energy-dispersive spectrometer (EDS, Noran System 7, Thermofisher, Waltham, MA, USA). The surface and cross-section of the CS/SEBS sensor were observed using FE-SEM (Quanta FEG, FEI, Hillsboro, OR, USA). Before SEM observation, all samples were sprayed with Au. Raman spectroscopy was measured on a laser Raman spectrometer (DXR2, Thermofisher, Waltham, MA, USA). The crystal structure of CS was detected using X-ray diffraction (XRD, DX2700, Haoyuan Instrument, Dandong, China) with Cu Kα radiation (40 kV, 30 mA, 4° min−1). Thermogravimetric analysis (TGA) was conducted in air (heating rate: 10 °C min−1) on TGA/DSC 3+ (Mettler Toledo, Zurich, Switzerland).
3. Results and Discussion
3.1. CS and CS/SEBS Sensors
CS, as one kind of carbon black, is a zero-dimensional carbon nanomaterial composed of multi-carbon alkanes, which is compatible with nonpolar SEBS well and can be facilely produced by the incomplete combustion of candles [36,37]. Figure 1a shows the SEM image of CS particles, which present a loose and porous accumulation of nanoscale spherical particles with a mean size of 67 nm. It is worth mentioning that the reproducibility of CS preparation is good because of the strict control of the distance between the burning candle and the sample plate. The morphology of six batches of CS revealed no obvious difference and the average diameters varied within a small and reasonable size range (Figure S1). EDS analysis certified that CS nanoparticles contained the elements C, O, and Al (Figure S2a). The presence of O was attributed to the incomplete burning of candles and Al originated from the aluminum plate for CS deposition. To investigate the carbon feature, Raman spectroscopy was performed as shown in Figure 1b. Two strong peaks at 1340 cm−1 and 1589 cm−1 were detected, which were assigned to D and G bands, originating from disordered amorphous and graphitic carbon, respectively. The peak intensity ratio (ID/IG) was calculated to 0.991 using the peak height of D and G peaks. Low ID/IG value (<1) indicated a relative content of amorphous carbon in CS [38]. The XRD pattern of CS nanoparticles (Figure S2b) shows two Bragg diffraction peaks at approximately 24° and 43°, which correspond to the (002) and (100) faces of the hexagonal graphite structure of carbon, respectively. The strong peak at 24° confirmed the existence of a large amount of amorphous carbon [39]. TGA result of CS shows that the weight loss of CS was only 1.29% at 500 °C in air, suggesting thermal stability (Figure S3).
Figure 1c shows that the relative resistance change (ΔR/R0) of CS/SEBS strain sensors (CS-0.01/SEBS, CS-0.015/SEBS, and CS-0.02/SEBS) with different CS dispersion concentrations as a function of strain, where R0 is the initial resistance and ΔR is the resistance change at a specific stain. The stretching speed was 50 mm/min. The curve of CS-0.01/SEBS had obvious fluctuation when the strain exceeded 40%, while the curve of CS-0.02/SEBS obtained a strong vibration when the strain was 10%–40%. As a comparison, CS-0.015/SEBS showed a stable performance when it was stretched to 100%. The GF [(ΔR/R0)/ε] is commonly used to determine the sensitivity responding to strain [40], where ε is the strain. Overall, a medium sensitivity was achieved by the CS-0.015/SEBS sensor. Figure 1d–f demonstrates the three sensors from a vertical view, from which wrinkle morphologies are observed. It is explained that after CS nanoparticles were pressed and transferred to the n-hexane-swollen and viscous SEBS layer, the shrinkage of the SEBS layer caused by n-hexane volatilization led to a shrinkage of the CS coating layer, which induced the wrinkled CS coatings. Figure 1g–i revealed the section SEM images of the three samples. It was found that the thickness of the CS layer increased when the CS concentration increased during the preparation. The thicknesses were 4.0, 5.9, and 7.7 μm for CS-0.01/SEBS, CS-0.015/SEBS, and CS-0.02/SEBS, respectively. It is worth mentioning that low CS dispersion concentration brought a nonuniformity of the CS coating, where tiny holes were observed such as the CS-0.01/SEBS sensor (Figure S4). Interestingly, the CS-0.02/SEBS sensor obtained a thick and loose CS coating, which induced a strong vibration of the ΔR/R0-strain curve in the strain range of 10%–40%. In the following research, the CS-0.015/SEBS sensor was chosen as the studying sample because of its good sensing stability.
3.2. Sensing Property
The tensile stress−strain curves of the CS-0.015/SEBS sensor combined with SEBS and n-hexane-treated SEBS were tested (Figure S5a). The tensile strengths were 2.86, 3.14, and 3.81 MPa and the break elongations were 1624%, 1928%, and 2043%, for SEBS, n-hexane-treated SEBS, and CS-0.015/SEBS, respectively. The result proves that n-hexane-treatment and CS-coating-treatment do not weaken the mechanical property of SEBS (Figure S5b) and the mechanical property of the CS-0.015/SEBS sensor is similar to the PDMS-based strain sensor [41]. Figure 2a demonstrates that the elastomer sensor showed a relatively low mechanical hysteresis when being subjected to a 10-time cyclic stretching−releasing test at 1%, 3%, 5%, and 10% strain, respectively. In the case of large strains such as 30%, 50%, and 80%, the cycle curves displayed a weak hysteresis phenomenon in the first cycle, which vanished rapidly in the next cycles and remained stable thereafter. These were attributed to the stiffness softening explained by the Mullin effect [42]. The low hysteresis exhibited by the CS/SEBS sensor was highly beneficial for the reconstruction of CS conductive coating at low and high strain, endowing the conductive CS layer with great recoverability for various strain-sensing applications. As demonstrated in Figure 2b, the current−voltage (I−V) curves of the CS-0.015/SEBS sensor at various static tensile strains presented a good linear relationship, well complying with Ohm’s law, which indicated that a stable CS conductive layer was successfully established on the SEBS surface. In addition, with the increase in strain, the slope of the I−V curve gradually decreased, revealing that the resistance increased.
To investigate the strain sensing sensitivity of CS-0.015/SEBS, the ΔR/R0-strain curve was presented (Figure 2c) and GF values were calculated. The GF values in 0%–9%, 9%–60%, and 60%–100% strain ranges were 113, 77, and 177 by linear fitting, respectively. Surprisingly, the sensor demonstrated high GF values from a very low strain to a high strain. Figure 2d shows the GF values with the sensing ranges for various resistance strain sensors reported in recent years (Table S1) [8,11,15,19,22,40,41,43,44,45,46,47,48,49,50,51,52,53,54]. It is found that the CS-0.015/SEBS sensor prepared here has a good sensitivity performance in the 0%–100% strain range, which is better than most other studies. Although several studies obtained highly sensitive wide-range-sensing, the methods were still complicated and multiple conductive materials were utilized. For example, Xu et al. [44] fabricated a stretchable transparent electrode via a self-cracking channel structure and a wettability self-assembly patch. The conductive ink included silver nanowire, CNT, and poly (3,4-ethylenedioxythiophene): polystyrene sulfonate (PEDOT: PSS). In this research, our method is simple and only low-cost zero-dimensional CS and SEBS are utilized. To further evaluate the sensitivity in a wide strain range for practical application, the relative resistance variations of the CS-0.015/SEBS sensor under 10 repetitive stretching-releasing cycles with different strains were recorded (Figure 2e,f). Interestingly, when the tensile strain was as low as 0.1%, the sensor still revealed an obvious relative resistance change, confirming that it could sense slight vibrations. Under a large strain such as 80%, the sensor still showed stable sensing signals. Figure S6a shows the relative resistance change of the CS-0.015/SEBS sensor stretched to 10% strain at different stretching speeds. It demonstrated that the sensing performance was almost not affected by the stretching speed. The response speed was also an important property of sensors. Figure S6b shows the electrical signals of the CS-0.015/SEBS sensor during the loading and recovery with a rapid stretching speed of 1000 mm/min. The response time of the sensor was 265 ms and the recovery time was 473 ms, which was a medium response time compared with other reported strain sensors [32,44,46,50,52]. A certain overshoot of relative resistance change was observed during the stretching, which was attributed to the difference in mechanical modulus between the SEBS elastomer matrix and the conductive CS layer.
3.3. Sensing Mechanism
To explain the high sensitivity of the sensor at such a wide strain range, the sensing mechanism of the CS-0.015/SEBS sensor was investigated. The crack morphology evolution of CS coating in the stretching and releasing process was monitored at different strains (Figure 3). The topography of the original sensor is illustrated in Figure 3a, which contains some uplifted micro-cracks and irregular wrinkles. It is attributed to the shrinkage of the CS induced by the shrinkage of the swelled SEBS surface during the drying of the preparation. As the sample was stretched to 5% strain, the CS layer began to fracture, generating some new minute cracks perpendicular to the stretching direction, which kept a connecting state (Figure 3b,g). At this state, the spreading or dislocation of the surface wrinkles increased the resistance, and the “tunnel effect” [31] was explained to bring a high sensitivity of the sensor with a GF value of 113. With the strain increasing to 30%, a large number of cracks were generated and propagated along with the tension direction (Figure 3c), which reduced the number of conductive pathways and increased the sensor resistance. Under this condition, the tunnel effect of micro-cracks was still the main sensing mechanism, but it weakened with crack spacing increased, leading to a decrease in GF value. When the strain reached 80%, the crack gap sharply enhanced with an average spacing of ~7.7 μm and separated block or island structures appeared (Figure 3d). At this state, the resistance of the sensor was mainly determined by the change of contact resistance (Rc) between cracks [28]. The increase in crack spacing led to a sharp increase in Rc in the conductive path, giving a high GF value of 177. The feature of micro-cracks and cracks weakened on the CS surface when the sensor was gradually released from the tensile state, indicating a good reconstruction of the conductive layer (Figure 3e,f). Generally, the tunnel effect brings a high sensitivity in low and medium strain ranges, while contact resistance brings a good performance in the high strain range. It should be mentioned that although the feature of micro-cracks and cracks was obvious, the adhesion and stability between the CS and SEBS layer remained good, since the CS layer partially infiltrated into the SEBS at the interface (Figure 1h). During the stretching–releasing cycle between 0% and 100% strain, no CS powder fell off from the sensor (Figure S7), indicating a good repeatability.
3.4. Cycle Performance
Sensor durability under the long-term stretching−releasing cycles was investigated as shown in Figure 4. Figure 4a shows the ΔR/R0 values of the CS-0.015/SEBS sensor stretched for 200 cycles at 1% strain. In the first 20 cycles, the ΔR/R0 value decreased fast, and then it gradually decreased very slightly and became relatively stable. It was ascribed to the reduction of resistance induced by the rearrangement of the conductive CS network. Negative ΔR/R0 values occurring during the stretching−releasing cycle were explained by the fact that at a low strain, the ΔR and ΔR/R0 values were relatively low and they were easily influenced by the conductive network rearrangement. A similar phenomenon was observed in some reported articles [55,56]. At 30% strain, ΔR/R0 value of the CS-0.015/SEBS sensor first increased and afterwards dropped slightly during the stretching−releasing cycles (Figure 4b). The increase in ΔR/R0 value was attributed to the cracking of the CS layer while the decrease was because of the repair and the rearrangement of the CS conductive network. At 80% strain, ΔR/R0 value rose slowly at the initial state and thereafter declined slightly (Figure 4c). Although ΔR/R0 values of the sensors were unstable in the initial stretching−releasing cycles with 1%, 30%, and 80% strain due to the conductive network rearrangement and the movement hysteresis of SEBS macromolecules [55,57], the following relative equilibriums of output signals were reached. Figure 4d shows the ΔR/R0 variation during 1000 loading−unloading cycles at 30% strain, which proves the long-term repeatability and stability.
3.5. Respiration and Motion Monitoring
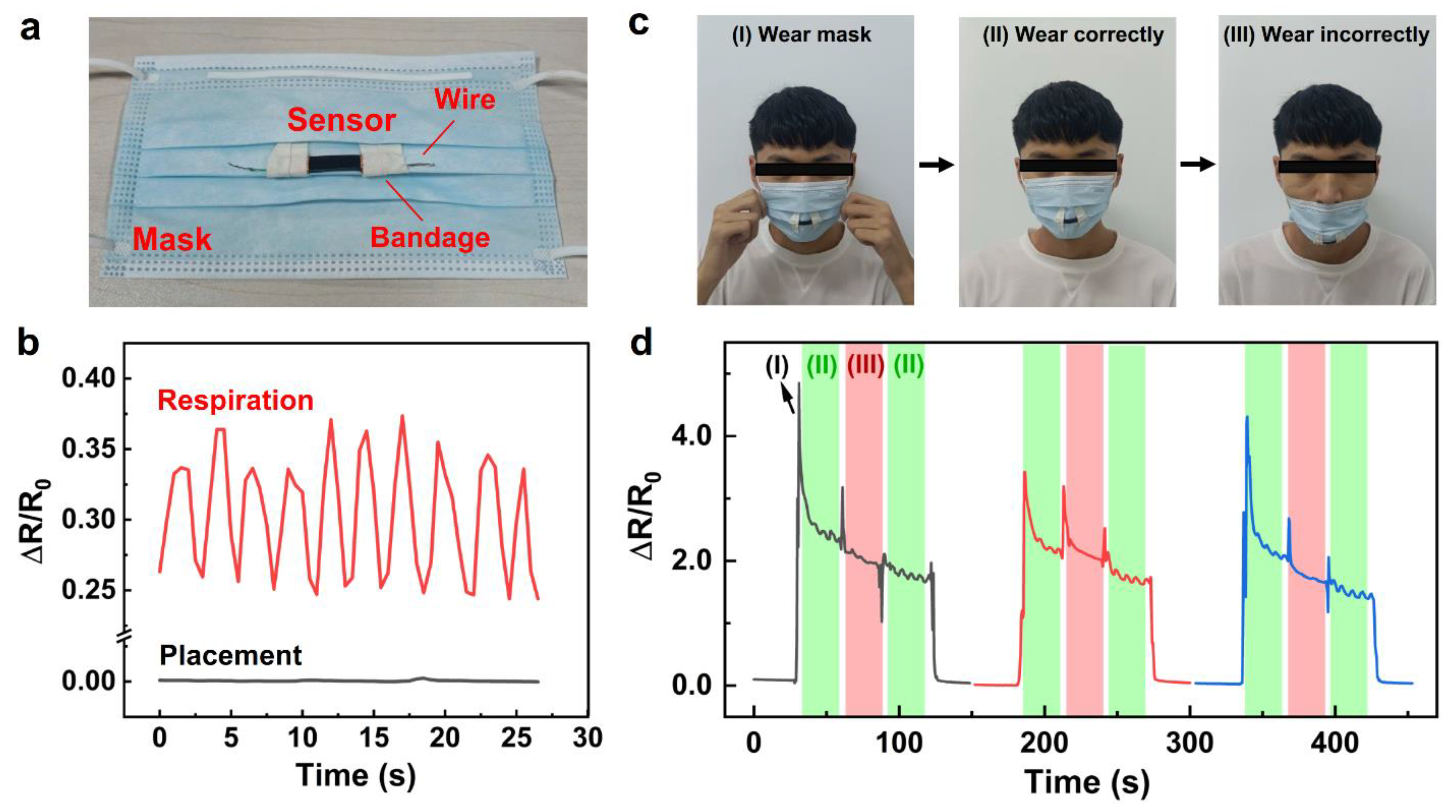
With the worldwide spread of COVID-19 in recent years, disposable surgical masks are extensively used, which can effectively filter viruses and prevent virus transmission. The wrong way to wear the mask will reduce the filtering effect of the virus. Herein, the CS/SEBS sensor was fixed to the mask with bandages to detect and monitor respirations (Figure 5a). Under the condition of correct wearing of a mask and normal breathing, a stable and regular resistance change of the sensor was detected, indicating that it could effectively capture the tiny movement of the mask induced by the breathing airflow of the mask wearer (Figure 5b). Furthermore, wearing a mask correctly and incorrectly (Figure 5c) caused a different relative resistance change (Figure 5d). The resistance change of the sensor was weak when the mask was worn under the wearer’s nostrils. Interestingly, the action of wearing and pulling down the mask both brought obvious resistance changes, which were stronger than those under breathing conditions. Therefore, the CS/SEBS sensor can be utilized to real-time monitor the behavior of wearing masks.
Figure 6a shows a CS/SEBS sensor fixed on a kneepad for body motion monitoring. For common walking behavior, the knee bends at various degrees when the human body walks on a flat road, up stairs, and down stairs (Figure 6b), inducing various stretching deformations of the sensor. The ΔR/R0–time curves of walking under three different styles for three cycles were depicted in Figure 6c. The motion of walking down revealed the largest relative resistance change, while the motion of walking on the flat showed the weakest electrical signal. The good sensitivity performance of the CS/SEBS sensor for human motion demonstrates that it can be applied as a wearable sensing device.
3.6. Road Roughness Monitoring
Furthermore, the sensor was stretched with a strain of 80% to detect the roughness of various roads. The concept design was based on the excellent sensitivity of the CS/SEBS sensor with a GF value of 177 in the 60%–100% strain range. The sensor system consisted of a CS/SEBS sensor, a cubic load, and a homemade mechanical stretching device (Figure 7a). The sensor was fixed between the two ends of the stretching device with the cubic weight (side length: 1 cm; mass: 6.2 g) attached under it to increase the sensitivity (Figure 7b). The sensor and stretching device combined with a multimeter as a detector were fixed to a bicycle (Figure 7c). The bicycle was pushed forward at a speed of about 0.3 m/s for 180 s on three types of roads including a marble flat road, a plastic racetrack paved with polyurethane synthetic rubber, and a cobblestone road with various roughness (Figure 7d). Figure 7e shows the resistance signals of the sensor during the movement of the bicycle. Under a stationary condition, the resistance showed a stable and unchanged ΔR/R0 value. When the bicycle was pushed forward on the flat marble road, ΔR/R0 values started to vibrate slightly. When the roughness of the road increased such as the plastic racetrack and cobblestone road, the ΔR/R0 values gradually vibrated acutely. The sensor obtained the largest ΔR/R0 vibration on the cobblestone road. These results confirm that the road roughness can be distinguished from the amplitude of ΔR/R0 for three roads during the moving of the bicycle. It should be mentioned that the detection of road roughness was achieved using a highly stretched CS/SEBS sensor with a strain of 80%. As a contrast, the CS/SEBS sensor without elongation was also utilized to measure the road roughness by the same procedure (Figure S8). The results show that it is hard to distinguish the ΔR/R0 amplitude of marble road and plastic racetrack. A large bulge was observed in the ΔR/R0−time curve of the cobblestone road (Figure S8), which was regarded as instability of the resistance signal. The failed detection of road roughness for the unstretched CS/SEBS sensor is explained by the sensitivity (GF = 113) of the sensor under original length and small strain condition being lower than that under high strain condition (GF = 177, strain: 60%–100%).
4. Conclusions
In summary, we reported a facile and inexpensive method for fabricating a stretchable, highly sensitive, wide-range-sensing strain sensor composed of bilayer CS/SEBS composites. Employing a polymer-surface-swelling-adhesion method, conductive CS nanoparticles were attached to the SEBS elastomer surface and wrinkles and micro-cracks formed on the CS layer. When the CS content was 0.015 g for CS/ethanol dispersion during the preparation, the CS/SEBS sensor obtained a good stability. The GF values of the sensor were measured at 113, 77, and 177 for various strain ranges of 0%–9%, 9%–60%, and 60%–100%, respectively, which gave a high sensitivity performance in a wide strain range compared with similar works in several years. Additionally, the CS/SEBS sensor revealed a fast tensile and recovery response, and good cyclic durability. The sensing mechanism is explained by the tunnel effect for low and medium strain ranges and contact resistance change for the high strain range. The CS/SEBS sensor could be utilized to real-time monitor different behaviors of wearing a mask, humans walking on the flat, up stairs, and down stairs as a wearable sensing device. Furthermore, when the sensor was stretched with a strain of 80%, it could be applied to detect the roughness of various types of roads such as a flat marble road, a plastic racetrack, and a cobblestone road. The bilayer CS/SEBS sensors exhibit the merits such as high sensitivity, broad detection range, low cost and simple preparation. In addition, the demerits such as medium response time exist, which need to be improved in the following research.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/coatings13061010/s1, Figure S1: SEM images of six batches of CS; Figure S2: EDS spectrum and XRD pattern of candle soot; Figure S3: thermogravimetry analysis (TGA) curve of CS; Figure S4: image of deposited and dried CS in the Teflon mold with a CS dispersion (CS content: 0.01 g, ethanol: 10 mL); Figure S5: tensile stress-strain curves of SEBS, n-hexane-treated SEBS, and CS-0.015/SEBS; Figure S6: ΔR/R0−time curves of the CS-0.015/SEBS sensor at 10% strain with different stretching speeds (5–50 mm/min); Figure S7: photos of the CS-0.015/SEBS sensor during the stretching−releasing cycle; Figure S8: real-time recording of ΔR/R0−time curves when the bicycle was static or pushed forward on various roads with an unstretched sensor; Table S1: the material, sensing range, GF, and correlation coefficient (R2) of the sensors in recent publications and this work.
Author Contributions
Y.W. carried out the experiment, collected the data, performed the data analyses, and wrote the manuscript. Z.X. revised the manuscript, provided theoretical guidance, designed, and conducted the project. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Natural Science Foundation of Shandong Province (ZR2021ME115).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Jang, H.; Sel, K.; Kim, E.; Kim, S.; Yang, X.; Kang, S.; Ha, K.H.; Wang, R.; Rao, Y.; Jafari, R.; et al. Graphene e-tattoos for unobstructive ambulatory electrodermal activity sensing on the palm enabled by heterogeneous serpentine ribbons. Nat. Commun. 2022, 13, 6604. [Google Scholar] [CrossRef] [PubMed]
- Sanderson, K. Electronic skin: From flexibility to a sense of touch. Nature 2021, 591, 685–687. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.K.; Kim, M.; Pyun, K.; Kim, J.; Min, J.; Koh, S.; Root, S.E.; Kim, J.; Nguyen, B.-N.T.; Nishio, Y.; et al. A substrate-less nanomesh receptor with meta-learning for rapid hand task recognition. Nat. Electron. 2022, 6, 64–75. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Seyedin, S.; Uzun, S.; Levitt, A.; Anasori, B.; Dion, G.; Gogotsi, Y.; Razal, J.M. MXene composite and coaxial fibers with high stretchability and conductivity for wearable strain sensing textiles. Adv. Funct. Mater. 2020, 30, 1910504. [Google Scholar] [CrossRef]
- Zheng, Y.; Yin, R.; Zhao, Y.; Liu, H.; Zhang, D.; Shi, X.; Zhang, B.; Liu, C.; Shen, C. Conductive MXene/cotton fabric based pressure sensor with both high sensitivity and wide sensing range for human motion detection and E-skin. Chem. Eng. J. 2021, 420, 127720. [Google Scholar] [CrossRef]
- Horev, Y.D.; Maity, A.; Zheng, Y.B.; Milyutin, Y.; Khatib, M.; Yuan, M.M.; Suckeveriene, R.Y.; Tang, N.; Wu, W.W.; Haick, H. Stretchable and highly permeable nanofibrous sensors for detecting complex human body motion. Adv. Mater. 2021, 33, 2102488. [Google Scholar] [CrossRef]
- Liu, L.; Niu, S.; Zhang, J.; Mu, Z.; Li, J.; Li, B.; Meng, X.; Zhang, C.; Wang, Y.; Hou, T.; et al. Bioinspired, omnidirectional, and hypersensitive flexible strain sensors. Adv. Mater. 2022, 34, 2200823. [Google Scholar] [CrossRef]
- Liang, B.; Zhang, Z.; Chen, W.; Lu, D.; Yang, L.; Yang, R.; Zhu, H.; Tang, Z.; Gui, X. Direct patterning of carbon nanotube via stamp contact printing process for stretchable and sensitive sensing devices. Nano-Micro Lett. 2019, 11, 92. [Google Scholar] [CrossRef]
- Gao, Q.; Kopera, B.A.F.; Zhu, J.; Liao, X.; Gao, C.; Retsch, M.; Agarwal, S.; Greiner, A. Breathable and flexible polymer membranes with mechanoresponsive electric resistance. Adv. Funct. Mater. 2020, 30, 1907555. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Yang, Y. Graphene-polymer nanocomposite-based redox-induced electricity for flexible self-powered strain sensors. Adv. Energy Mater. 2018, 8, 1800961. [Google Scholar] [CrossRef]
- Ha, S.H.; Kim, J.M. Simple route to performance modulation of resistive strain sensor based on strain-engineered stretchable substrate with customized hard template. Compos. Sci. Technol. 2022, 217, 109111. [Google Scholar] [CrossRef]
- Paghi, A.; Corsi, M.; Corso, S.; Mariani, S.; Barillaro, G. In situ controlled and conformal coating of polydimethylsiloxane foams with silver nanoparticle networks with tunable piezo-resistive properties. Nanoscale Horiz. 2022, 7, 425–436. [Google Scholar] [CrossRef] [PubMed]
- Iglio, R.; Mariani, S.; Robbiano, V.; Strambini, L.; Barillaro, G. Flexible polydimethylsiloxane foams decorated with multiwalled carbon nanotubes enable unprecedented detection of ultralow strain and pressure coupled with a large working range. ACS Appl. Mater. Interfaces 2018, 10, 13877–13885. [Google Scholar] [CrossRef] [PubMed]
- Lin, M.; Zheng, Z.; Yang, L.; Luo, M.; Fu, L.; Lin, B.; Xu, C. A high-performance, sensitive, wearable multifunctional sensor based on rubber/CNT for human motion and skin temperature detection. Adv. Mater. 2022, 34, 2107309. [Google Scholar] [CrossRef]
- Taromsari, S.M.; Shi, H.H.; Saadatnia, Z.; Park, C.B.; Naguib, H.E. Design and development of ultra-sensitive, dynamically stable, multi-modal GnP@MXene nanohybrid electrospun strain sensors. Chem. Eng. J. 2022, 442, 136138. [Google Scholar] [CrossRef]
- Jung, D.; Lim, C.; Park, C.; Kim, Y.; Kim, M.; Lee, S.; Lee, H.; Kim, J.H.; Hyeon, T.; Kim, D.H. Adaptive self-organization of nanomaterials enables strain-insensitive resistance of stretchable metallic nanocomposites. Adv. Mater. 2022, 34, 2200980. [Google Scholar] [CrossRef]
- Zhou, X.; Zhang, X.; Zhao, H.; Krishnan, B.P.; Cui, J. Self-healable and recyclable tactile force sensors with post-tunable sensitivity. Adv. Funct. Mater. 2020, 30, 2003533. [Google Scholar] [CrossRef]
- Zhu, S.; Sun, H.; Lu, Y.; Wang, S.; Yue, Y.; Xu, X.; Mei, C.; Xiao, H.; Fu, Q.; Han, J. Inherently conductive poly(dimethylsiloxane) elastomers synergistically mediated by nanocellulose/carbon nanotube nanohybrids toward highly sensitive, stretchable, and durable strain sensors. ACS Appl. Mater. Interfaces 2021, 13, 59142–59153. [Google Scholar] [CrossRef]
- Mercadillo, V.O.; Chan, K.C.; Caironi, M.; Athanassiou, A.; Kinloch, I.A.; Bissett, M.; Cataldi, P. Electrically conductive 2D material coatings for flexible and stretchable electronics: A comparative review of graphenes and MXenes. Adv. Funct. Mater. 2022, 32, 2204772. [Google Scholar] [CrossRef]
- Chun, S.; Hong, A.; Choi, Y.; Ha, C.; Park, W. A tactile sensor using a conductive graphene-sponge composite. Nanoscale 2016, 8, 9185–9192. [Google Scholar] [CrossRef]
- He, Y.; Wu, D.; Zhou, M.; Zheng, Y.; Wang, T.; Lu, C.; Zhang, L.; Liu, H.; Liu, C. Wearable strain sensors based on a porous polydimethylsiloxane hybrid with carbon nanotubes and graphene. ACS Appl. Mater. Interfaces 2021, 13, 15572–15583. [Google Scholar] [CrossRef]
- Xu, W.; Hu, S.; Zhao, Y.; Zhai, W.; Chen, Y.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. Nacre-inspired tunable strain sensor with synergistic interfacial interaction for sign language interpretation. Nano Energy 2021, 90, 106606. [Google Scholar] [CrossRef]
- Afroj, S.; Tan, S.R.; Abdelkader, A.M.; Novoselov, K.S.; Karim, N. Highly conductive, scalable, and machine washable graphene-based e-textiles for multifunctional wearable electronic applications. Adv. Funct. Mater. 2020, 30, 2000293. [Google Scholar] [CrossRef]
- Mousavi, S.; Thai, M.T.; Amjadi, M.; Howard, D.; Peng, S.H.; Do, T.N.; Wang, C.H. Unidirectional, highly linear strain sensors with thickness-engineered conductive films for precision control of soft machines. J. Mater. Chem. A 2022, 10, 13673–13684. [Google Scholar] [CrossRef]
- Sheng, N.; Ji, P.; Zhang, M.; Wu, Z.; Liang, Q.; Chen, S.; Wang, H. High sensitivity polyurethane-based fiber strain sensor with porous structure via incorporation of bacterial cellulose nanofibers. Adv. Electron. Mater. 2021, 7, 2001235. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, J.; Ma, C.; Sun, J.; Tian, L.; Li, X.; Li, F.; Han, X.; Liu, C.; Shen, C.; et al. Detection of non-joint areas tiny strain and anti-interference voice recognition by micro-cracked metal thin film. Nano Energy 2017, 34, 578–585. [Google Scholar] [CrossRef]
- Lee, J.; Shin, S.; Lee, S.; Song, J.; Kang, S.; Han, H.; Kim, S.; Kim, S.; Seo, J.; Kim, D.; et al. Highly sensitive multifilament fiber strain sensors with ultrabroad sensing range for textile electronics. ACS Nano 2018, 12, 4259–4268. [Google Scholar] [CrossRef]
- Wang, Y.; Qin, W.; Hu, X.; Liu, Z.; Ren, Z.; Cao, H.; An, B.; Zhou, X.; Shafiq, M.; Yin, S.; et al. Hierarchically buckled Ti3C2Tx MXene/carbon nanotubes strain sensor with improved linearity, sensitivity, and strain range for soft robotics and epidermal monitoring. Sens. Actuators B Chem. 2022, 368, 132228. [Google Scholar] [CrossRef]
- Zahid, M.; Zych, A.; Dussoni, S.; Spallanzani, G.; Donno, R.; Maggiali, M.; Athanassiou, A. Wearable and self-healable textile-based strain sensors to monitor human muscular activities. Compos. Part B Eng. 2021, 220, 108969. [Google Scholar] [CrossRef]
- Yang, T.; Li, X.; Jiang, X.; Lin, S.; Lao, J.; Shi, J.; Zhen, Z.; Li, Z.; Zhu, H. Structural engineering of gold thin films with channel cracks for ultrasensitive strain sensing. Mater. Horizons 2016, 3, 248–255. [Google Scholar] [CrossRef]
- Noh, J.Y.; Ha, S.H.; Jeon, G.R.; Kim, J.M. Geometrical and electrical modulation of cracked metal films based on metal nanowire/elastomer composites for high-performance wearable strain sensing. Compos. Sci. Technol. 2022, 230, 109738. [Google Scholar] [CrossRef]
- Chen, J.; Zheng, J.; Gao, Q.; Zhang, J.; Zhang, J.; Omisore, O.M.; Wang, L.; Li, H. Polydimethylsiloxane (PDMS)-based flexible resistive strain sensorsfor wearable applications. Appl. Sci. 2018, 8, 345. [Google Scholar] [CrossRef]
- Zeng, J.; Ma, W.J.; Wang, Q.Q.; Yu, S.L.; Innocent, M.T.; Xiang, H.X.; Zhu, M.F. Strong, high stretchable and ultrasensitive SEBS/CNTs hybrid fiber for high-performance strain sensor. Compos. Commun. 2021, 25, 100735. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, H.; Wu, J.; Han, L.; Yang, Z.; Jiang, Z.; Wang, R.; Huang, Z.; Xu, M. Ultrafast self-healing, reusable, and conductive polysaccharide-based hydrogels for sensitive ionic sensors. ACS Sustain. Chem. Eng. 2020, 8, 18506–18518. [Google Scholar] [CrossRef]
- Yang, C.; Li, Z.; Huang, Y.; Wang, K.; Long, Y.; Guo, Z.; Li, X.; Wu, H. Continuous roll-to-roll production of carbon nanoparticles from candle soot. Nano Lett. 2021, 21, 3198–3204. [Google Scholar] [CrossRef]
- Mulay, M.R.; Chauhan, A.; Patel, S.; Balakrishnan, V.; Halder, A.; Vaish, R. Candle soot: Journey from a pollutant to a functional material. Carbon 2019, 144, 684–712. [Google Scholar] [CrossRef]
- Singh, S.; Singh, D.; Singh, S.P.; Pandey, A.K. Candle soot derived carbon nanoparticles: Assessment of physico-chemical properties, cytotoxicity and genotoxicity. Chemosphere 2019, 214, 130–135. [Google Scholar] [CrossRef]
- Kanakaraj, R.; Sudakar, C. Candle soot carbon nanoparticles as high-performance universal anode for M-ion (M = Li+, Na+ and K+) batteries. J. Power Sources 2020, 458, 228064. [Google Scholar] [CrossRef]
- Mai, D.; Mo, J.; Shan, S.; Lin, Y.; Zhang, A. Self-healing, self-adhesive strain sensors made with carbon nanotubes/polysiloxanes based on unsaturated carboxyl-amine ionic interactions. ACS Appl. Mater. Interfaces 2021, 13, 49266–49278. [Google Scholar] [CrossRef]
- Zhu, S.; Lu, Y.; Wang, S.; Sun, H.; Yue, Y.; Xu, X.; Mei, C.; Xiao, H.; Fu, Q.; Han, J. Interface design of stretchable and environment-tolerant strain sensors with hierarchical nanocellulose-supported graphene nanocomplexes. Compos. Part A 2023, 164, 107313. [Google Scholar] [CrossRef]
- Dong, J.; Li, L.; Zhang, C.; Ma, P.; Dong, W.; Huang, Y.; Liu, T. Ultra-highly stretchable and anisotropic SEBS/F127 fiber films equipped with an adaptive deformable carbon nanotube layer for dual-mode strain sensing. J. Mater. Chem. A 2021, 9, 18294–18305. [Google Scholar] [CrossRef]
- Hu, Y.; Huang, T.; Zhang, H.; Lin, H.; Zhang, Y.; Ke, L.; Cao, W.; Hu, K.; Ding, Y.; Wang, X.; et al. Ultrasensitive and wearable carbon hybrid fiber devices as robust intelligent sensors. ACS Appl. Mater. Interfaces 2021, 13, 23905–23914. [Google Scholar] [CrossRef]
- Niu, S.; Chang, X.; Zhu, Z.; Qin, Z.; Li, J.; Jiang, Y.; Wang, D.; Yang, C.; Gao, Y.; Sun, S. Low-temperature wearable strain sensor based on a silver nanowires/graphene composite with a near-zero temperature coefficient of resistance. ACS Appl. Mater. Interfaces 2021, 13, 55296–55307. [Google Scholar] [CrossRef]
- Paul, S.J.; Elizabeth, I.; Gupta, B.K. Ultrasensitive wearable strain sensors based on a VACNT/PDMS thin film for a wide range of human motion monitoring. ACS Appl. Mater. Interfaces 2021, 13, 8871–8879. [Google Scholar] [CrossRef]
- Wang, Z.; Luan, C.; Liao, G.; Liu, J.; Yao, X.; Fu, J. High-performance auxetic bilayer conductive mesh-based multi-material Integrated stretchable strain sensors. ACS Appl. Mater. Interfaces 2021, 13, 23038–23048. [Google Scholar] [CrossRef]
- Xu, J.; Qiu, Z.; Yang, M.; Chen, J.; Luo, Q.; Wu, Z.; Liu, G.S.; Wu, J.; Qin, Z.; Yang, B.R. Stretchable transparent electrode via wettability self-assembly in mechanically induced self-cracking. ACS Appl. Mater. Interfaces 2021, 13, 52880–52891. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, R.; Li, D.; Zhang, L.; Ren, G.; Wang, L.; Liu, J.; Wang, D.; Tang, Z.; Lu, G.; et al. High-performance foam-shaped strain sensor based on carbon nanotubes and Ti3C2Tx MXene for the monitoring of human activities. ACS Nano 2021, 15, 9690–9700. [Google Scholar] [CrossRef]
- Wei, Y.; Li, X.; Wang, Y.; Hirtz, T.; Guo, Z.; Qiao, Y.; Cui, T.; Tian, H.; Yang, Y.; Ren, T.L. Graphene-based multifunctional textile for sensing and actuating. ACS Nano 2021, 15, 17738–17747. [Google Scholar] [CrossRef]
- Wang, L.; Xia, M.; Wang, D.; Yan, J.; Huang, X.; Luo, J.; Xue, H.G.; Gao, J.F. Bioinspired superhydrophobic and durable octadecanoic acid/Ag nanoparticle-decorated rubber composites for high-performance strain sensors. ACS Sustain. Chem. Eng. 2021, 9, 7245–7254. [Google Scholar] [CrossRef]
- Wang, S.; Fang, Y.; He, H.; Zhang, L.; Li, C.; Ouyang, J. Wearable stretchable dry and self-adhesive strain sensors with conformal contact to skin for high-quality motion monitoring. Adv. Funct. Mater. 2021, 31, 2007495. [Google Scholar] [CrossRef]
- Jia, S.; Deng, S.; Qing, Y.; He, G.; Deng, X.; Luo, S.; Wu, Y.; Guo, J.; Carmalt, C.J.; Lu, Y.; et al. A coating-free superhydrophobic sensing material for full-range human motion and microliter droplet impact detection. Chem. Eng. J. 2021, 410, 128418. [Google Scholar] [CrossRef]
- Dai, Z.; Ding, S.; Lei, M.; Li, S.; Xu, Y.; Zhou, Y.; Zhou, B. A superhydrophobic and anti-corrosion strain sensor for robust underwater applications. J. Mater. Chem. A 2021, 9, 15282–15293. [Google Scholar] [CrossRef]
- Pu, J.H.; Zhao, X.; Zha, X.J.; Li, W.D.; Ke, K.; Bao, R.Y.; Liu, Z.Y.; Yang, M.B.; Yang, W. A strain localization directed crack control strategy for designing MXene-based customizable sensitivity and sensing range strain sensors for full-range human motion monitoring. Nano Energy 2020, 74, 104814. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, Y.; Zhou, Y.; Dai, K.; Zheng, G.; Zhang, B.; Liu, C.; Shen, C. High-performance wearable strain sensor based on graphene/cotton fabric with high durability and low detection limit. ACS Appl. Mater. Interfaces 2020, 12, 1474–1485. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Y.; Song, F.; Zhang, H.; Zhang, Q.; Xu, J.; Wang, H.; Ke, F. Graphene decorated fiber for wearable strain sensor with high sensitivity at tiny strain. Adv. Mater. Technol. 2021, 6, 2100421. [Google Scholar] [CrossRef]
- Wang, J.Q.; Qian, P.F.; Lou, T.J.; Wang, W.; Geng, W.H.; Jing, L.C.; Bao, Z.L.; Wang, T.; Geng, H.Z. Vacuum-assisted layer-by-layer carbon nanotube/Ti3C2TX MXene films for detecting human movements. Adv. Mater. Technol. 2021, 7, 2101096. [Google Scholar] [CrossRef]
Scheme 1.
The schematic diagram of the preparation procedure of the CS/SEBS sensor.

Figure 1.
(a) SEM and (b) Raman spectrum of CS nanoparticles. (c) Relative resistance changes versus tensile strain for CS/SEBS sensors. SEM images of (d) CS-0.01/SEBS, (e) CS-0.015/SEBS, and (f) CS-0.02/SEBS from a vertical view. Cross-sectional SEM images of (g) CS-0.01/SEBS, (h) CS-0.015/SEBS, and (i) CS-0.02/SEBS.
Figure 1.
(a) SEM and (b) Raman spectrum of CS nanoparticles. (c) Relative resistance changes versus tensile strain for CS/SEBS sensors. SEM images of (d) CS-0.01/SEBS, (e) CS-0.015/SEBS, and (f) CS-0.02/SEBS from a vertical view. Cross-sectional SEM images of (g) CS-0.01/SEBS, (h) CS-0.015/SEBS, and (i) CS-0.02/SEBS.

Figure 2.
Sensing properties of CS-0.015/SEBS sensors. (a) The Stress-strain curve under 1%, 3%, 5%, 10%, 30%, 50%, and 80% cyclic strain. (b) I−V curves of CS-0.015/SEBS with 0, 1%, 3%, 5%, 10%, 30%, 50%, and 80% strain. (c) Relative resistance changes of CS-0.015/SEBS sensor toward the applied strain. (d) Summary of the GF of various strain sensors with the strain range in recent publications [8,11,15,19,22,40,41,43,44,45,46,47,48,49,50,51,52,53,54]. (e) Relative resistance changes respond to 0.1%, 0.3%, 0.5%, 0.8%, 1%, 3%, 5%, and 8% cyclic strains. (f) Relative resistance changes respond to 10%, 20%, 30%, 40%, 50%, 60%, 70%, and 80% cyclic strains.
Figure 2.
Sensing properties of CS-0.015/SEBS sensors. (a) The Stress-strain curve under 1%, 3%, 5%, 10%, 30%, 50%, and 80% cyclic strain. (b) I−V curves of CS-0.015/SEBS with 0, 1%, 3%, 5%, 10%, 30%, 50%, and 80% strain. (c) Relative resistance changes of CS-0.015/SEBS sensor toward the applied strain. (d) Summary of the GF of various strain sensors with the strain range in recent publications [8,11,15,19,22,40,41,43,44,45,46,47,48,49,50,51,52,53,54]. (e) Relative resistance changes respond to 0.1%, 0.3%, 0.5%, 0.8%, 1%, 3%, 5%, and 8% cyclic strains. (f) Relative resistance changes respond to 10%, 20%, 30%, 40%, 50%, 60%, 70%, and 80% cyclic strains.

Figure 3.
SEM images of the CS-0.015/SEBS coating at (a–d) various tensile strains (0, 5%, 30%, 80%) and (e,f) corresponding recovery states. (g) Cross-section diagram of the strain sensing mechanism.
Figure 3.
SEM images of the CS-0.015/SEBS coating at (a–d) various tensile strains (0, 5%, 30%, 80%) and (e,f) corresponding recovery states. (g) Cross-section diagram of the strain sensing mechanism.

Figure 4.
Relative resistance variations of the CS-0.015/SEBS sensor with different strains: (a) 1%, (b) 30%, and (c) 80% under 200 stretching−releasing cycles. The insets of (a–c) are the enlarged adjacent 20 strain loading-unloading cycle diagrams. The insets are the amplified parts of the blue dashed box. (d) The relative resistance variations during 1000 cyclic loading−unloading at 30% strain.
Figure 4.
Relative resistance variations of the CS-0.015/SEBS sensor with different strains: (a) 1%, (b) 30%, and (c) 80% under 200 stretching−releasing cycles. The insets of (a–c) are the enlarged adjacent 20 strain loading-unloading cycle diagrams. The insets are the amplified parts of the blue dashed box. (d) The relative resistance variations during 1000 cyclic loading−unloading at 30% strain.

Figure 5.
Application of the CS-0.015/SEBS sensor for respiration monitoring with a mask. (a) Photo of a mask attached with a CS-0.015/SEBS sensor. (b) Relative resistance changes under respiration and placement conditions with a mask. (c) Photos of different actions: the action of wearing a mask, wearing a mask correctly, and wearing a mask incorrectly and (d) corresponding ΔR/R0−time curves for 3 cycles.
Figure 5.
Application of the CS-0.015/SEBS sensor for respiration monitoring with a mask. (a) Photo of a mask attached with a CS-0.015/SEBS sensor. (b) Relative resistance changes under respiration and placement conditions with a mask. (c) Photos of different actions: the action of wearing a mask, wearing a mask correctly, and wearing a mask incorrectly and (d) corresponding ΔR/R0−time curves for 3 cycles.

Figure 6.
Application of the CS-0.015/SEBS sensor for motion monitoring. (a) Photo of a kneepad attached with a CS-0.015/SEBS sensor. (b) Photos of knee bending in different gaits: walking on flat ground, upstairs, and downstairs and (c) corresponding ΔR/R0−time curves for three cycles.
Figure 6.
Application of the CS-0.015/SEBS sensor for motion monitoring. (a) Photo of a kneepad attached with a CS-0.015/SEBS sensor. (b) Photos of knee bending in different gaits: walking on flat ground, upstairs, and downstairs and (c) corresponding ΔR/R0−time curves for three cycles.

Figure 7.
Application of the CS-0.015/SEBS sensor for road roughness monitoring. (a) Sensor system consisted of a CS/SEBS sensor stretched to 80% strain, a cubic load, and a homemade mechanical stretching device. (b) Simplified schematic diagram of the sensor system. (c) The sensor system was attached to a bicycle with a digital multimeter as detector. (d) The photos of three types of roads with different roughness: marble flat road, plastic racetrack, and cobblestone road. (e) Real-time recording of ΔR/R0−time curves when the bicycle was static or pushed forward on various roads.
Figure 7.
Application of the CS-0.015/SEBS sensor for road roughness monitoring. (a) Sensor system consisted of a CS/SEBS sensor stretched to 80% strain, a cubic load, and a homemade mechanical stretching device. (b) Simplified schematic diagram of the sensor system. (c) The sensor system was attached to a bicycle with a digital multimeter as detector. (d) The photos of three types of roads with different roughness: marble flat road, plastic racetrack, and cobblestone road. (e) Real-time recording of ΔR/R0−time curves when the bicycle was static or pushed forward on various roads.

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wang, Y.; Xiong, Z. Wide-Range-Sensing Candle Soot/Elastomer Strain Sensors with High Sensitivity. Coatings 2023, 13, 1010. https://doi.org/10.3390/coatings13061010
AMA Style
Wang Y, Xiong Z. Wide-Range-Sensing Candle Soot/Elastomer Strain Sensors with High Sensitivity. Coatings. 2023; 13(6):1010. https://doi.org/10.3390/coatings13061010
Chicago/Turabian StyleWang, Yuan, and Zhong Xiong. 2023. "Wide-Range-Sensing Candle Soot/Elastomer Strain Sensors with High Sensitivity" Coatings 13, no. 6: 1010. https://doi.org/10.3390/coatings13061010
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.